Echipamente de navigatie
1. Compasul magnetic
Compasul
magnetic este instrumentul bazat pe principiul orientarii pe directia liniilor
de forta ale campului magnetic a unui ac magnetic liber suspendat, folosit
pentru determinarea directiilor la bordul navelor.
In
prezent, in navigatia curenta, utilizarea compasului magnetic in determinarea
directiilor la bord are un rol secundar, importanta sa insa este deosebita
avand in vedere independenta sa de sursele de energie de la bord.
Prezenta sa la bord este obligatorie pentru toate navele,
ofiterul de cart avand obligatia permanenta de a confrunta indicatiile
girocompasului cu cele ale compasului magnetic, pentru a sesiza la timp
eventualele erori in indicatiile acestuia.
Partile componente ale compasului
magnetic sunt (Fig. 1):
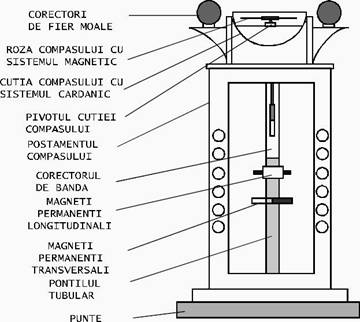
Fig. 1
roza compasului cu sistemul magnetic,
constand in:
o un disc gradat in sistem circular de la 0o la
360o, pentru citirea directiilor in orizont;
o flotorul, ce are functia de a reduce frecarea sistemului
de sprijinire a rozei pe pivot;
o sistemul de ace magnetice.
cutia compasului cu sistemul cardanic;
dispozitivele
de compensare, formate din:
o pontilul tubular;
o suportii magnetilor de compensare longitudinali (de tip
B) si transversali (C);
o corectorul de banda (J);
o corectorii de fier moale (D).
habitaclul, este un capac de protectie montat deasupra cutiei
compasului;
instalatia
de iluminare
Dupa tipul constructiv,
compasurile magnetice se impart in:
compasuri
uscate, la care roza este
suspendata pe un pivot;
compasuri
cu lichid, la care roza este
afundata intr-un lichid constituit dintr-un amestec de apa distilata si alcool,
intr-o proportie determinata de zona de navigatie.
In functie de locul de
instalare si de modul de utilizare a compasului magnetic, distingem:
compasul etalon, montat pe puntea etalon, in locul cu cele mai mici
influente magnetice. Acesta este folosit pentru controlul drumului navei si
masurarea relevmentelor;
compasul de drum instalat in timonerie, dupa care se asigura guvernarea
navei;
Pentru limitarea influentelor
magnetice, asupra compasului de drum se folosesc compasuri cu reflexie
care sunt compasuri etalon prevavute cu un tub telescopic trecut prin punte si
cu o oglinga orientabila care da posibilitatea folosirii compasului etalon
pentru tinerea drumului navei.
Compasul magnetic este folosit la bord la
determinarea directiilor in orizontul adevarat, aceasta folosind pentru
rezolvarea urmatoarelor probleme:
guvernarea navei;
masurarea relevmentelor la obiecte.
Pentru guvernarea navei, compasul
da posibilitatea tinerii unui drum compas astfel incat nava sa se deplaseze
intr-un drum adevarat dorit. Drumul compas se citeste la gradatia
din dreptul liniei de credinta dinspre prova.
Masurarea relevmentelor la bord cu
ajutorul compasului magnetic se face folosind o alidada confectionata dintr-un
material amagnetic. Relevmentele ce se masoara sunt relevmente compas, adica
unghiuri masurate in planul orizontului adevarat, intre directia nord
compas si directia la reper.
De asemenea, se pot masura relevmente prova, acestea
citindu-se pe cercul azimutal gradat in sistem semicircular, montat pe cutia
compasului etalon.
Corectia compasului magnetic
Compasul magnetic aflat la bordul navei este supus
influentei a doua campuri magnetice majore: campul
magnetic terestru si campul magnetic
al navei.
Corectia compasului magnetic DC) este suma algebrica dintre declinatia
magnetica
(d), data de campul magnetic terestru si deviatia magnetica
(d ,
data de campul magnetic al navei.
DC= d + d
Declinatia magnetica este aceeasi pentru toate
navele intr-un anumit moment pentru un punct de pe
sfera terestra. Aceasta prezinta variatii in timp datorita variatiilor campului
magnetic terestru.
Valorile daclinatiilor magnetice sunt trecute in hartile de navigatie in
rozele magnetice. Aici sunt notate de asemenea anul corespunzator valorii
respective si variatia in timp a declinatiei. Avand aceste date, ofiterii
calculeaza declinatia magnetica pentru anul in curs spre a o folosi in calculul
corectiei compas.
Declinatia magnetica este
unghiul in planul orizontului adevarat al observatorului masurat intre directia
nord adevarat si directia nord magnetic (Fig. 2)
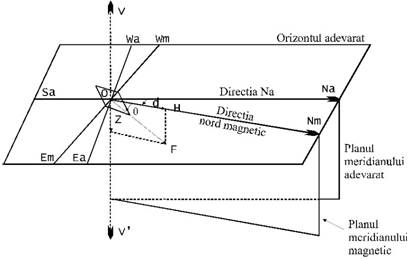
Fig. 2
Deviatia magnetica este specifica fiecarei nave
si chiar prezinta diferite valori pentru aceeasi nava in functie de variatiile
campului magnetic al acesteia.
In practica navigatiei valorile deviatiilor magnetice se iau dintr-un tabel
al deviatiilor intocmit cu ocazia compensarii compasului (operatiune de
determinare a deviatiilor si reducere a acestora).
Totusi, cand se observa ca s-au inregistrat variatii semnificative ale campului
magnetic al navei, trebuie sa se procedeze la intocmirea unui nou tabel al
deviatiilor.
Astfel de situatii pot aparea cand:
nava stationeaza timp indelungat in aceeasi pozitie;
se mentine timp indelungat acelasi drum;
se incarca sau descarca produse
cu proprietati magnetice;
se utilizeaza pentru
operatiunile de incarcare/descarcare macarale electromagnetice;
corpul navei este supus la
vibratii puternice (la andocare, esuari etc.)
corpul navei este supus unor
variatii mari de temperatura (sudura, indreptare basele cu flacara etc.)
Deviatia magnetica este unghiul
in planul orizontului adevarat al observatorului masurat intre directia nord
magnetic si directia nord compas.
Pentru convertirea drumurilor si relevmentelor citite la compasul magnetic
se vor folosi urmatoarele formule:
Da = Dc + DC
Ra = Rc + DC,
unde DC este corectia
compasului magnetic ce se defineste ca unghi
in planul orizontului adevarat, masurat intre directia nord adevarat si
directia nord compas.
Avem urmatoarele relatii intre drumuri, respectiv
relevmente:
Ra = Rm + d Da = Dm + d
Rm = Rc
+ d Dm = Dc + d
2. Girocompasul
Girocompasul sau
compasul giroscopic serveste la determinarea directiei nord adevarat, folosind
proprietatile mecanice ale giroscopului.
Giroscopul
este constituit, in principial, dintr-un tor si un sistem de suspensie
cardanica. Torul este capabil sa execute o miscare de rotatie rapida in jurul
axei sale de simetrie, cu frecari minime, practic considerate neglijabile. Axa
principala a unui giroscop cu doua grade de libertate si un grad de libertate
limitat in orizont, instalat pe o platforma fixa la uscat, tinde sa se
orienteze in meridianul locului, sub influenta rotatiei Pamantului ;
extremitatea axei principale, de unde rotatia torului se vede in sens direct,
se orienteaza spre nord.
Acelasi
girocompas instalat la bordul navei aflata in navigatie prezinta o comportare
diferita. Miscarile la care nava este supusa (miscarea navei intr-un anumit
drum, cu o anumita viteza, cresterea sau reducerea vitezei, schimbarile de
drum, ruliul si tangajul etc.), genereaza o serie de erori care fac ca directia
nord girocompas sa difere de directia
nord adevarat printr-un unghi care poarta numele de corectie girocompas.
Girocompasul
se amplaseaza la bord intr-un loc ferit de vibratii, temperaturi ridicate sau
variatii mari de temperatura si cat mai aproape de intersectia axei longitudinale de ruliu cu
axa transversala de tangaj.
Pentru
a pune la dispozitia ofiterilor de marina informatia referitoare la directia
nord giro, la bordul navei se instaleaza in diverse locuri impuse de
necesitatile conducerii navei repetitoare ale compasului giroscopic. Denumirea
lor este data de functia pe care o indeplinesc la bord : repetitor de
drum, instalat in timonerie, langa timona, pentru guvernarea navei ;
repetitoare pentru relevmente, instalate de regula in borduri sau pe puntea de
comanda etc.
Un
repetitor al compasului giroscopic are ca element principal o roza gradata de
la 0 la 359 , actionata cu ajutorul unor
selsine care asigura concordanta prezentarii drumului giro urmat de nava fata
de o linie de credinta marcata pe habitaclul repetitorului.
Corectia girocompasului
Corectia girocompasului Dg) este, asa cum prezentam mai
sus, unghiul format intre directia nord adevarat si directia nord
girocompas ; ea este data de relatiile :
Dg = Ra - Rg
Dg = Da - Dg
La
un girocompas in stare normala de functionare, la latitudini frecvente
navigatiei, corectia girocompasului are valori mici si se compune din :
deviatia girocompasului (dg) care variaza in functie de
viteza navei, drum si latitudinea locului si se corecteaza prin calcul folosind
tabela de deviatie a girocompasului sau automat printr-un corector al
girocompasului ;
eroarea constanta A a
girocompasului, care poate fi exprimata astfel:
A = Dg - dg
Relatii pentru
convertirea drumurilor si relevmentelor:
relatii intre Da
si Dg:
Da = Dg + Dg
Dg = Da - Dg
relatii intre Ra
si Rg:
Ra = Rg + Dg
Rg = Ra - Dg
relatii intre Rp,
Dg si Rg:
Rg = Rp + Dg
Rp = Rg - Dg
Dg = Rg - Rp
Lochul
Lochul
este un mijloc de navigatie utilizat la determinarea vitezei si a distantei
parcurse de nava.
Primul
tip de loch folosit la bordul velierelor, lochul ordinar dateaza din anul 1620 si el consta dintr-un
sector de lemn prevazut cu o greutate in partea inferioara si legat cu o saula,
pe care incepand de la un anumit semn care era numit « desteptator »,
se faceau noduri separate de spatii egale cu distanta parcursa de nava o nava
ce merge cu o mila pe ora in timp de jumatate de minut. Masurarea timpului se
facea cu un nisipar.
Pentru
a determina viteza, se fila saula cu sectorul de lemn la apa, in pupa
navei ; acesta se mentinea in pozitie verticala, ca un punct fix, datorita
rezistentei opuse. Cand « desteptatorul » trecea prin mana
marinarului ce fila saula, se rasturna simultan nisiparul ; la scurgerea
jumatatii de minut marcate de nisipar, se oprea filarea saulei. Daca nava se
deplasa nu n mile pe ora, prin mana marinarului se treceau n
noduri. Astfel s-a ajuns la notiunea de nod, care exprima viteza navei de
o mila pe ora.
Mai
tarziu, lochul ordinar a fost inlocuit cu lochul mecanic, care consta dintr-o elice cu pas constant, remorcata in
pupa navei ; rotirea elicei, proportional cu deplasarea navei, se
transmitea prin intermediul unei saule la un contor mecanic ce indica distanta
parcursa.
In
prezent se foloseste lochul hidrodinamic, care determina viteza navei
pe baza presiunii hidrodinamice opuse de apa la deplasarea navei si lochul
ultrason Doppler, care aplica proprietatile propagarii ultrasunetelor
in apa de mare si efectul Doppler.
4. Sonda
Masurarea
adancimii apei
Pentru
prevenirea punerii pe uscat la navigatia in ape putin adanci, la pregatirea
manevrei de ancorare, la navigatia in apropierea coastei pe timp de
vizibilitate redusa si in multe alte situatii, se impune masurarea adancimii
apei.
Mijloacele
folosite la bord pentru masurarea adancimii apei se numesc sonde. Prezenta sondelor la bord este impusa de catre registrele
navale. R.N.R. obliga la existenta la bord a unei sonde simple si a unei sonde
ultrason.
Sonda
Simpla
Aceasta
sonda se compune dintr-o greutate si o saula gradata; adancimea masurandu-se cu
ajutorul saulei gradate, orientate pe verticala locului, fiind filata pana cand
greutatea atinge fundul marii.
Greutatea
este de 3-5 kg, iar saula are o lungime de cca. 50 m. Gradarea saulei sondei
este facuta la fiecare metru si, de asemenea, la fiecare 5 si 10 metri. Inainte
de gradare, saula se uda si se intinde usor.
In
momentul citirii adancimii saula trebuie orientata pe directia verticalei
locului. Pe timpul zilei, citirea adancimii se face la nivelul apei iar pe
timpul noptii la nivelul copastiei, scazandu-se apoi inaltimea copastiei
deasupra apei.
Sondajele cu sonda simpla se executa in
bordul de sub vant.
Greutatea
sondei are in partea inferioara un orificiu care se umple cu seu, pentru a se
lua probe in vederea stabilirii naturii fundului marii (nisip, mal etc.). In
cazul in care fundul este stancos sau cu pietre, suprafata seului se deformeaza
in contact cu fundul. Natura fundului intereseaza in general la manevra de
ancorare, dar si pentru orientarea in determinarea pozitiei navei.
Situatii
in care se foloseste sonda ultrason:
- ca mijloc de control a preciziei sondei ultrason;
- pentru luarea de probe de fund la manevra de ancorare;
- pe timpul incarcarii navei in porturi, pentru a putea
opri incarcarea la pescajul maxim admis de autoritatea portuara;
- in caz de esuare a navei, cand se executa sondaje in
jurul navei care se trec apoi intr-o schita pentru aprecierea situatiei,
putandu-se lua apoi decizia in ceea ce priveste manevra de dezesuare.
Sonda
ultrason
Principiul
masurarii adancimii apei cu sonda ultrason consta in urmatoarele:
- un emitator de ultrasunete instalat pe fundul navei
emite periodic impulsuri scurte de unde ultrasonore, sub forma unui fascicul
dirijat in jos pe o directie verticala;
- fasciculul de ultrasunete este reflectat de fundul
marii si receptionat la bordul navei de un receptor montat si el pe fundul
navei. La unele instalatii, emitatorul indeplineste si functia de receptor;
- cunoscand viteza de propagare a ultrasunetelor in apa
se poate calcula adancimea apei sub
chila, prin masurarea timpului necesar fasciculului de a parcurge distanta
nava-fund si inapoi. Viteza medie de propagare a undelor ultrasonore in apa de
mare se considera a fi de 1500 m/s.
Scala
sondei se gradeaza in metri, brate sau picioare, un dispozitiv special
transformand timpul necesar impulsurilor pentru a se intoarce in indicatii de
adancime. Pe langa indicarea adancimilor, sonda le poate si inregistra
putandu-se obtine astfel profilul fundului marii.
Propagarea
ultrasunetelor in apa de mare
Ultrasunetele
sunt vibratii sonore ce ies din limita de audibilitate a urechii omului avand o
frecventa mai mare de 20000 Hz.
Folosirea
undelor sonore in navigatie este impusa de faptul ca acestea se constitue in
singura energie oscilatorie care se propaga satisfacator in apa de mare.
Propagarea
ultrasunetelor in apa de mare prezinta urmatoarele particularitati:
ultrasunetele se pot propaga sub forma de fascicule
dirijate, avand o lungime de unda mica;
datorita propagarii dirijate, energia radiata de emitator
este concentrata pe directia de propagare, dandu-i o mare putere de patrundere;
la intalnirea unei suprafete de separare a doua medii,
ultrasunetele se reflecta si se refracta ca si undele luminoase;
dau nastere fenomenului de cavitatie, care se manifesta
prin aparitia unor bule de aer ce se ridica la suprafata apei.
Ca mediu de propagare, apa marii prezinta urmatoarele
proprietati:
energia ultrasunetelor scade odata cu indepartarea
acestora de sursa care le produce;
nu este un mediu omogen si face ca propagarea sa fie
diferita in diverse puncte ale apei.
viteza de propagare a ultrasunetelor creste cu
temperatura, salinitatea si presiunea apei de mare.
in apa de mare impulsurile intalnesc zgomote de reverberatie care le perturba propagarea; aceste zgomote
sunt provocate de valuri, nava, etc. Pentru combaterea acestor perturbatii,
sonda este construita capabila sa recunoasca semnalul emis.
Sondele
ultrason poseda un sistem optic pentru citirea adancimilor, dar si
posibilitatea inregistrarii valorilor acestora. RNR obliga navele sa aiba
ambele sisteme, atat sistemul optic cat si inregistratorul.
Pentru
inregistrare, sondele au o banda de hartie de compozitie speciala care este
derulata cu o viteza constanta, pe ea lasand urme o penita speciala numita stil. Linia formata de punctele
generate de ecouri se numeste linia
ecourilor sau linia fundului. Penita mai lasa la marginea din stanga a
hartiei o serie de urme ce se constitue in linia
zero.
Cand
sonda se foloseste pentru controlul pozitiei navei atunci adancimile trebuie
corectate in functie de pescajul navei pentru a putea fi comparate cu cele
trecute in harta. Aceasta deoarece sonda masoara adancimea apei sub chila.
Precizia
adancimilor masurate cu sonda ultrason trebuie verificata periodic cu ajutorul
sondei simple, masurand in zona vibratoarelor simul tan cu masurarea facuta de
aceasta.
Pe
funduri dure (stanci, pietre), in indicatiile sondei pot aparea ecouri duble
sau triple datorita capacitatii mari de reflexie a acestora, in conditiile in
care adancimile sunt mici sau medii si amplificarea este excesiva.
Mai
exista posibilitatea aparitiei de asa-numite ecouri false datorate bancurilor
de pesti, particulelor de nisip, vietatilor marine, plancton, straturi care
separa mase de apa de temperaturi sau salinitate mult diferite etc.
Chiar
daca pozitia vibratoarelor a fost bine alesa se poate ca in anumite situatii
sonda sa fie totusi afectata de fenomenul de aerare a straturilor de apa de sub
carena navei (crearea de bule de aer). Situatiile in care
acesta poate aparea sunt urmatoarele:
- la tangaj si ruliu mare, pe mare agitata, cand nava
este in balast, avand un pescaj mic;
- cand se naviga in balast cu o viteza mare, avand o
apupare excesiva;
- la manevra de ancorare, datorita bulelor create la
punerea masinii inapoi;
- la shimbari de drum cu unghiuri mari de carma;
- dupa stationari ale navei in zone cu fund malos.
Sonda ultrason
poate avea si alte intrebuintari decat masurarea adancimilor. Astfel, la
adancimi mici (pana la 100 m), poate folosi pentru identificarea epavelor, iar
cele cu fascicul orientabil sunt de un ajutor deosebit pescadoarelor pentru
identificarea bancurilor de pesti.
O sonda
ultrason folosita la bordul navelor maritime trebuie sa asigure masurarea
adancimii pana la 500 m, cu o precizie de +/- 0.5 m pana la 20 m si +/- 3% la
adancimi superioare.
Scara adancimilor trebuie sa fie impartita in cel putin
doua game 0-100, 100-500 m. Sonda trebuie sa poata avea o functionare continua
de cel putin 12 ore fara pericolul supraincalzirii partilor componente.
5. Radarul
Radarul
este un echipament electronic de navigatie deosebit de util la bordul navelor,
indiferent de marimea sau destinatia acestora, dotarea navelor cu asemenea
echipamente fiind ceruta prin conventii internationale.
Numele
RADAR provine de la cuvintele RAdio Detection And Ranging si este deci un mijloc de radiolocatie care
serveste la detectarea obiectelor (nave, geamanduri, coasta etc., numite
« tinte ») din zona acoperita de bataia acestuia, precum si la
masurarea relevmentului si a distantei la ele.
Radarul
foloseste principiul ecoului. Spre exemplu, daca pe timp de ceata o nava emite
un sunet scurt de sirena si acesta intalneste un obiect capabil sa-l reflecte,
distanta la obiect este egala cu jumatatea produsului dintre intervalul de timp
masurat intre momentul emiterii semnalului si cel al receptiei ecoului, prin
viteza de propagare a sunetului in atmosfera. Directia aproximativa la obiect
este indicata de directia de intensitate maxima a ecoului, raportata la roza
compasului.
Radarul
aplica principiul ecoului astfel :
antena emite impulsuri foarte
scurte de energie electromagnetica cu o perioada de repetitie determinata, care
se propaga sub forma unor fascicule inguste ;
la intalnirea unei tinte pe
directia de propagare a impulsului, o parte din energia electromagnetica
reflectata se intoarce la nava sub forma de « ecou », fiind receptionata
de aceeasi antena ;
distanta la obiect este
determinata funtie de intervalul de timp dintre momentul emisiei impulsului si
cel al receptiei ecoului (aceluiasi impuls) si de viteza de propagare a undei
radio ;
relevmentul la obiect este
determinat de detectia antenei in momentul emisiei-receptiei impulsului.
Fig.
3
Informatiile
astfel obtinute sunt plotate pe un tub cinescopic. Evident ca detectarea
tintelor este conditionata de inaltimea la care acestea se afla precum si de
materialul din care sunt constituite.
In Fig.
3 prezentam schema bloc a unei instalatii radar.
6. Receptorul pentru navigatia cu sateliti
Cu
ani in urma, o aeronava comerciala se prabusea in Atlantic in proximitatea Long
Island. Mai multe agentii puneau bazele unei forte comune destinata recuperarii
victimelor si mai tarziu a epavei.
Tehnologia
folosita atunci « iti taia respiratia ». Kilometri patrati de ocean
cu o adancime de 120 picioare erau examinati de sonare si dispozitive de
scanare cu laser. Imaginea rezultata in urma operatiunilor revela un camp plin
de elemente ale caror coordonate erau deja cunoscute cu precizie. Scafandrii au
continuat operatiunea recuperand « tintele ». Provocarea care ramanea
in urma acestor complexe operatiuni era cum sa se determine exact pozitia unor
puncte de pe Pamant fara repere vizuale si care sa plaseze scafandrii destul de
precis pentru a evita cautari prelungite.
Raspunsul
a venit de la sistemul de pozitionare globala
a satelitilor pentru navigatie
(GPS) operat de catre Fortele Armate ale Statelor Unite ale Americii. El consta
dintr-o constelatie de 24 de sateliti artificiali pozitionati pe orbite in
jurul Pamantului, fiecare din ei transmitand date catre receptoare de navigatie
cu sateliti. Receptoarele GPS folosite permiteau determinarea pozitiei
geografice cu o acuratete sub un metru.
Daca
la inceputurile sale GPS-ul era un echipament care folosea la determinarea
pozitiei navei cu ajutorul satelitilor artificiali ai Pamantului, afisand
coordonatelor geografice pe un ecran, astazi el devine din ce in ce mai
complex. La scopul principal pentru care a fost construit au fost adaugate
numeroase functii, precum selectarea sistemului geodezic, introducerea unui
numar de rute de navigatie pe care nava le va urma, diferite modalitati de
afisare, calculul derivei, integrarea cu diversi « senzori » de pe nava.
Figura 4 prezinta imaginea unui receptor GPS actual.

Fig. 4
7. Receptoare pentru sistemele hiperbolice de navigatie
Sistemele
hiperbolice de navigatie (loran, decca si omega) se bazeaza pe determinarea
diferentei de distanta la doua sau mai multe perechi de statii de emisie. Linia
de pozitie folosita de aceste sisteme este hiperbola, definita ca diferenta de
distanta la doua statii de emisie, ale caror pozitii reprezinta cele doua
focare ale curbei; punctul navei se afla la intersectia a cel putin doua
asemenea linii de pozitie. In aplicarea sistemelor hiperbolice, a caror
denumire deriva de la natura geometrica a liniei de pozitie folosita, masurarea
diferentei de distanta este substituita prin :
masurarea diferentei de timp
dintre momentele receptiei la bord a semnalelor de la cele doua statii,
considerand viteza de propagare a undelor constanta; procedeul se aplica la
sistemul loran, ale carui statii emit impulsuri de energie
electromagnetica ;
masurarea diferentei de faza a
undelor radio receptionate de la cele doua statii, care emit unde
continue ; procedeul se aplica la sistemele decca si omega.
Receptoarele
loran, decca si omega sunt echipamente special construite pentru a servi
scopului determinarii liniilor de pozitie hiperbolice.
Sistemul
Omega a fost primul sistem de radionavigatie hiperbolica
ce a servit timp de 26 de ani cerintele navigatiei fiind scos din serviciu in
data de 30 septembrie 1997.
Sistemul
de navigatie Decca a fost inventat in S.U.A., dar a fost dezvoltat de
compania Decca Radio si Television Ltd. din Londra pentru ghidarea
ambarcatiunilor trupelor aliate la invazia din Normandia in timpul celui de al
II-lea razboi mondial. De atunci sistemul a fost continuu imbunatatit si timp
de 50 de ani a fost de un real folos navigatorilor pe intreg globul prin
intermediul lanturilor de statii dispuse in zone cu trafic intens (vestul
Europei, coastele Canadei, golful Persic, golful Bengal etc.). La 31 martie
2000 sistemul a fost scos din serviciu oficial.
Sistemul
Loran, in prima sa varianta Loran A a fost inventat tot
in timpul celui de al doilea razboi mondial si venea sa raspunda necesitatilor
navigatiei de lunga distanta pentru navele si aeronavele militare. Sistemul
avea o acoperire de 600 mile marine si folosea banda de 1850 - 1950 KHz. Loran
C a fost dezvoltat in anii 50, opereaza in banda de 90 - 100 KHz si are o mai
mare acuratete decat predecesorul sau Loran A. Astazi inca mai este in serviciu.
8. Radiogoniometrul
Acest
echipament, a fost pana in anul 1939 singurul mijloc electronic de navigatie.
Radiogoniometria
se bazeaza pe masurarea directiei de propagare a undelor radio, ce defineste
relevmentul radiogoniometric la emitator.
Radiogoniometrul
este un echipament de radioreceptie prevazut cu o antena cadru, cu care se
determina directia undelor radio provenite de la un emitator. Unghiul dintre
directia nord adevarat si directia de propagare a undei radio este relevmentul
radiogoniometric (in navigatie denumit relevment radio), care sta la baza
determinarii liniei de pozitie radio, folosita pentru rezolvarea problemei
punctului navei.
Semnalele
radio destinate radiogoniometrarii de la bord sunt emise de radiofaruri
maritime circulare, instalate in locuri adecvate, la coasta sau pe nave-far, in
zonele de trafic intens sau cu conditii dificile de navigatie.
9. ECDIS
Conceptul ECDIS (Electronic
Chart Display and Information System), a fost introdus la inceputul anilor '80.
Acesta se defineste ca un sistem de vizualizare a
hartilor marine electronice si de informare, a carui implementare la bordul
navelor urmarea ameliorarea sigurantei navigatiei, impreuna cu toate efectele
ce deriva din aceasta, unul dintre cele mai importante fiind asigurarea
protectiei mediului inconjurator.
Ideea sistemului a aparut
o data cu dezvoltarea aparatelor electronice de navigatie si, desigur, cu
realizarea primelor harti digitale.
Aparitia hartilor electronice nu poate fi
considerata de data recenta, insa dezvoltarea rapida in ultima perioada a avut ca rezultat forme evoluate ce pot face obiectul
aprobarii lor ca harti care sa inlocuiasca complet hartile clasice de la bordul
navelor.
Primele harti digitale au fost harti realizate
prin introducerea fiecarui punct, pixel cu pixel, harti pentru care insa nu se
putea pune problema folosirii in navigatie datorita cantitatii mici de
informatii pe care acestea le cuprindeau.
Realizarea in aceasta maniera a unor harti
cuprinzand elementele necesare desfasurarii navigatiei ar fi costat deosebit de
mult si ar fi luat un timp indelungat pentru
realizarea lor, acoperirea zonelor frecvent utilizate in navigatie fiind
practic imposibila.
Dezvoltarea tehnicilor de
scanare a dus la aparitia primelor harti electronice apte pentru a fi folosite
in navigatia maritima. Aceste harti au fost realizate prin scanarea hartilor
clasice cele mai recente.
Servicile hidrografice ale
tarilor cu o dezvoltata activitate maritima au realizat deja biblioteci de
harti electronice in forma raster acoperind cele mai multe zone de navogatie de
pe glob. Amiralitatea britanica are de mai multi ani un serviciu special, AdmiralIty Raster Charts Service
(ARCS), care se ocupa cu realizarea, actualizarea si dezvoltarea acestor harti.
Folosirea unor astfel de harti, ca o simpla
reproducere a uneia clasice, face dificila modificarea elementelor individuale
ale acesteia. Fisierele hartilor
raster sunt de tip bitmap fiind de mari dimensiuni.
Evolutia producerii de soft din ultima
perioada a dus la realizarea hartilor vectorizate.
Acestea sunt organizate in mai multe fisiere separate ce
contin diferitele elemente ale hartii. Utilizatorul poate schimba individual
elementele hartii si introduce noi date in
respectivele fisiere. Fisierele hartilor de
tip vectorial sunt mult mai mici si mai mobile pentru aceeasi suprafata grafica
decat in cazul celor de tip raster.
Avantajele hartilor
vectoriale comparativ cu cele raster :
In hartile vectorizate pozitia
elementelor cartografice este raportata exclusiv la WGS 84 (World Geodetic
System), sistemul geodezic folosit de GPS. Hartile raster sunt raportate la
diferite sisteme geodezice, mai putin precise ;
Informatiile continute de
hartile raster sunt limitate la cele aflate uzual in hartile maritime,
adaugarea de informatii ingreunand lucrul pe harta prin incarcarea excesiva a
acesteia. Hartile vectorizate au posibilitatea afisarii obtionale a diferitelor
categorii / nivele de informatii, putand cuprinde astfel o cantitate mult mai
mare de date. Standardele impuse de organizatiile internationale prevad o serie
de elemente considerate vitale, care trebuie totusi sa fie afisate
permanent ;
Elementele grafice ale hartilor
raster nu pot fi individualizate din punct de vedere cartografic. In schimb, in
cazul hartilor vectorizate se pot efectua modificari la nivelele selectate (de
exemplu modificarea liniilor batimetrice in functie de variatia mareei) ;
Hartile vectorizate prezinta
posibilitatea specifica de alarmare a utilizatorului in situatia depasirii
anumitor limite / parametri setati de catre utilizator. Standardele ECDIS
prevad o serie de situatii in care sistemul trebuie in mod obligatoriu sa
declanseze anumite alarme ;
Hartile vectoriale dau
posibilitatea integrarii imaginii radar conform standardelor ECDIS ;
Una dintre cele mai importante
facilitati ale hartilor vectoriale este posibilitatea actualizarii rapide,
chiar automate, a hartii ceea ce duce la o siguranta sporita in navigatie si
economisirea timpului consumat in mod obisnuit pentru aducerea la zi a hartilor
clasice.
Desi producerea hartilor
vectorizate este mai costisitoare, avand in vedere diferentele majore intre
cele doua sisteme, superioritatea acestora este indiscutabila. Ca urmare se
prevede ca numai aceste harti sa poata inlocui complet in viitor hartile clasice
de navigatie.
ECDIS-ul ca parte componenta a
comenzii integrate contine doua elemente principale :
baza de date (Electronic
Navigational Chart - ENC), care contine sub forma digitala toate informatiile
necesare ;
Un echipament specializat
pentru prelucrarea si vizualizarea informatiilor, inclusiv a pozitiei si rutei
de navigatie, in timp real pe baza informatiilor furnizate de la echipamentele
de navigatie cu care este conectat.
Caracteristicile tehnice ale
ECDIS sunt definite de norme si specificatii (aprobate sau in curs de aprobare
de organizatiile internationale autorizate), cum ar fi :
Elementele cartografice ale
hartilor si modul de vizualizare a lor (IHO-S 52, dec. 1994) ;
Normele de transfer ale datelor
digitale hidrografice (IHO-S 57, mar. 1996) ;
Normele de functionare ECDIS
(IMO-A 817, dec. 1995) ;
Specificatii operationale si de
functionare, metode de verificare (Comisia Internationala de Electrotehnica -
Comitetul tehnic 80, Publ. 1174 din 1996 - versiune provizorie).
ECDIS poate fi programat sa dea
avertismente sonore sau/si vizuale la atingerea unor parametri limita.
Standardele IMO prevad in mod obligatoriu urmatoarele situatii de
alarmare :
Devierea de la ruta
planificata ;
Utilizarea unei
harti realizate in alt sistem geodezic decat WGS 84;
Apropierea de punctele de
schimbare de drum sau alte puncte caracteristice;
Depasirea limitelor stabilite
pentru abaterea de la drum ;
Afisarea unei harti la o scara
mai mare decat cea la care a fost digitizata ;
Disponibilitatea unei harti la
scara mai mare ;
Defectarea sistemului de
determinare a punctului ;
Depasirea limitei de siguranta
pentru diferite zone prestabilite ;
Functionarea
defectuoasa a sistemului.
Unitatile de masura folosite in
sistemul ECDIS sunt urmatoarele:
Coordonatele
geografice: latitudinea si longitudinea sunt afisate in grade, minute si zecimi
de minut, calculate in sistemul WGS 84;
Adancimile: date
in metri si decimetri, optional in brate si picioare;
Inaltimile:
metri, optional in picioare;
Distantele: mile
marine si cabluri sau metri;
Viteza: noduri si
zecimi de noduri.
Informatiile minime necesare pe care trebuie sa le poata prezenta ECDIS sunt:
mesaje si avertismente ECDIS;
date oficiale furnizate de
serviciile hidrografice ;
avizele de navigatie ;
avertismentele serviciilor hidrografice
si zonele evidentiate de acestea ;
informatii radar ;
date definite de
utilizator ;
date specifice
producatorului ;
zone evidentiate de
utilizator.
ECDIS trebuie sa realizeze urmatoarele calcule si transformari :
transformarea
coordonatelor geografice in coordonate display si invers;
transformarea
elementelor geodezice din sistemul local in WGS 84;
determinarea
distantei adevarate si azimutului dintre doua puncte;
determinarea
coordonatelor geografice pentru o pozitie cunoscuta functie de distanta si
azimut;
determinarea drumurilor si
distantelor pentru navigatia ortodromica.
Cresterea preciziei determinarii
punctului de catre sistemele electronice de navigatie, combinata cu tehnologia
hartilor digitale reprezinta o adevarata revolutie in navigatie. In viitorul apropiat comanda integrata de navigatie
va suplini metodele traditionale folosite in
conducerea navei, inclusiv la inlocuirea hartilor tiparite.
Recentele teste efectuate cu
nava DUTCH SPIRIT, dotata cu comanda integrata Racal-Decca MIRANIS 4600 au
dovedit ca pilotarea navei poate fi efectuata in conditii de siguranta pe baza
informatiilor oferite de sistemele electronice existente la bord. In cadrul programului BANET (Baltic & North Sea
ECDIS Testbed) s-a realizat actualizarea bazei de date a hartilor vectoriale
folosind sistemul de telefonie mobila GSM.
Luand in considerare
facilitatile ECDIS care duc in mod nemijlocit la sporirea sigurantei navigatiei
este important ca implementarea pe scara larga a acestuia la bordul navelor
maritime sa se efectueze in cat mai scurt timp.