Funcționarea SRA cu
elemente de execuție hidraulice - succesiunea fazelor procesului
automatizat
 Prin sistem automat de
acționare hidraulica (sau sistem
hidraulic de reglare automata) se ințelege prin urmare orice
dispozitiv sau instalație care realizeaza pe cale hidraulica
și in mod automat o dependența funcționala intre
marimea de ieșire (parametru controlat: deplasarea, presiunea,
debitul etc.) și marimea de intrare (programatoare sau perturbatoare).
Prin sistem automat de
acționare hidraulica (sau sistem
hidraulic de reglare automata) se ințelege prin urmare orice
dispozitiv sau instalație care realizeaza pe cale hidraulica
și in mod automat o dependența funcționala intre
marimea de ieșire (parametru controlat: deplasarea, presiunea,
debitul etc.) și marimea de intrare (programatoare sau perturbatoare).
Caracteristicile statice principale ale elementelor de actionare
hidraulice sunt caracterizate de viteza si de forta care
determina viteza de iesire si forta dezvoltata de
motorul de executie in functie de elementul de comanda. Folosind
presiuni inalte se pot comanda EE pana la 200m, fara pierderi
importante de presiune. Deosebit de eficienta este hidraulica atunci cand
trebuie actionate, in acelasi timp, mai multe EE (de exemplu:
macazurile folosite in transporturi etc.).
In instalatiile de automatizare se folosesc, in majoritatea cazurilor,
motoare hidraulice cu piston, care pot fi cu: miscare liniara și
miscare de rotatie.
Elementele de actionare hidraulica se construiesc in trei variante: cu piston, cu
membrana si cu organe rotative. Primele doua tipuri se realizeaza in constructie cu
cilindru fix sau cu piston fix si sunt asemanatoare celor pneumatice, iar cele cu organe rotative
sunt de tipul biela-manivela
sau de tipul cu paleta rotativa.
Servomotorul cu paleta rotativa determina o miscare de rotatie a axului de iesire pe care este montata paleta, sub influenta
presiunii lichidului asupra suprafetei
paletei.
Avantajele elementelor hidraulice fata de cele pneumatice constau
in posibilitatea utilizarii lor in medii explozive sau inflamabile, precum si
in faptul ca dezvolta o forta de actionare mai mare si actioneaza
mai rapid datorita incompresibilitatii uleiului.
Ambele sisteme (hidraulice si pneumatice) necesita instalatii speciale de producere si conservare a
uleiului sub presiune, aerului comprimat, ceea ce reprezinta un
dezavantaj fata de cele
electrice. Datorita acestor considerente, au aparut elemente de actionare
mixte (electrohidraulice, hidropneumatice, etc) care imbina
avantajele fiecarui sistem.
Prin automatizarea proceselor de productie se urmareste
eliminarea interventiei directe a omului in aceste procese, asigurandu-se
desfasurarea lor in conformitate cu anumite cerinte impuse,
fara interventia operatorului.
Principalele avantaje ale
automatizarii constau in:
cresterea
productivitatii muncii;
imbunatatirea
calitatii muncii;
reducerea efortului
intelectual depus de oameni in cadrul procesului de productie.
In structura oricarei instalatii automatizate se disting:
instalatia
tehnologica;
dispozitivul de automatizare.
Instalatia
tehnologica cuprinde ansamblul utilajelor in care se desfasoara
procesul tehnologic, iar dispozitivul de automatizare reprezinta
totalitatea elementelor care asigura automatizarea instalatiei
tehnologice. Instalatia tehnologica impreuna cu
dispozitivul de automatizare formeaza sistemul automat.
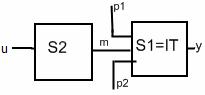
Cele mai simple sisteme automate sunt sistemele de comanda automata;
un asemenea sistem este reprezentat in figura 1, unde:
Semnalele (curenti sau tensiuni) care apar la iesirile sau
intrarile blocurilor din sistem sunt: u - marimea de comanda;
m - marimea de executie;
y
- marimea de iesire.
Modificarea marimii de iesire y se obtine prin modificarea
marimii de comanda u fara interventia directa a
operatorului uman asupra instalatiei tehnologice.
In realitate, legea de dependenta a marimii de iesire in
functie de marimea de intrare, y=f(u), poate
fi afectata de diferite marimi perturbatoare. Efectul acestor
marimi perturbatoare, notate cu P1 si P2 in figura 1, nu poate fi corectat de
catre un sistem de comanda si se impune, de aceea, efectuarea
unei comparatii intre marimea de intrare si marimea de
iesire. Sistemul din figura 1 devine astfel cel din figura 2 in care, pe
langa marimile si blocurile deferite anterior mai intervin:
EC - elemental de comparatie;
r - marimea de referinta;
e
- abaterea.
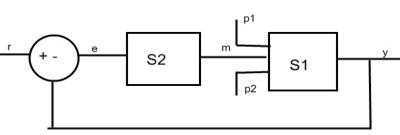
Fig.2.
Sistem de reglare automata
In elementul de comparatie se calculeaza diferenta (abaterea
e) intre marimea de referinta r si marimea de
iesire y (e = r - y), iar intregul sistem automat actioneaza
astfel incat sa micsoreze cat mai mult abaterea e. Legatura de
la iesire la elemntul de comparatie se numeste
legatura de reactie si cand y este o marime
electrica, aceasta legatura este pur si simplu un
conductor.
Atunci cand marimea de iesire se scade din marimea de
referinta, reactia se numeste negativa. Daca
elementul de comparatie s-ar fi obtinut nu diferenta ci suma
dintre marimile y si r, reactia s-ar fi numit pozitiva. In
sistemele automate reactia este totdeauna negativa.
In concluzie, sistemele de reglare automata (SRA) asigura o
anumita variatie in timp a uneia sau a mai multor marimi de
iesire y1..ym ale instalatiei tehnologice in functie
de evolutia in timp a uneia sau a mai multor marimi de intrare
r1rm (fig.3). Ele sunt descrise cu ajutorul unei scheme de elemente
(schema functionala sau schema unui bloc). Elementul unui sistem
automat (elementul de automatizare) este o parte componenta a unui sistem
automat care indeplineste o functie de sine statatoare.
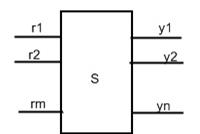
Fig.3. Sistem de reglare automata cu mai multe intrari si
mai multe iesiri
Principalul
avantaj al sistemelor de reglare fata de sistemele de comanda
automata constata in faptul ca influenta
perturbatiilor asupra marimii de iesire y este mult redusa.
Astfel sa preupunem ca din cauza unor perturbatii, turația
motorului creste peste valoare dorita. Tensiunea data de
tahogenerator creste, iar diferenta dintre tensiunea data de
potentiometru si tensiunea data de tahogenerator va scadea.
In consecinta, tensiunea de la iesirea amplificatorului se va micsora.
Marea diversitate a sistemelor
hidraulice de reglare automata - pentru controlul automat al celor mai
diferite marimi fizice: viteze, forțe, temperaturi, turații,
nivele etc. dar mai ales deplasari - nu impiedica totuși
formarea unei concepții unice de clasificare și tratare, bazata
pe identitatea de structura a
tuturor acestor sisteme, figura 4.
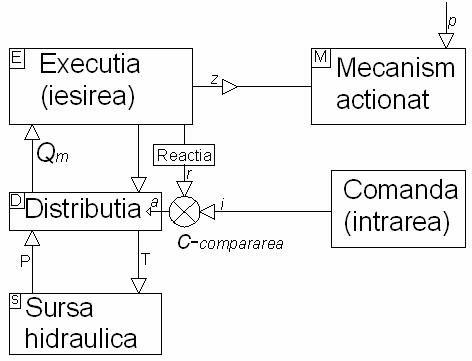
Fig.4. Sistem hidraulic de reglare automata
Mecanismul acționat M - asupra caruia se exercita
marimea de intrare perturbatoare p - primește semnalul de
ieșire z de la un organ
hidraulic de execuție E, care transmite totodata și un semnal de
reacție r la comparatorul C.
Acesta compara starea execuției (r)
cu starea marimii de intrare de comanda (programatoare) i, eroarea a dintre acestea (a = i -
r) fiind aplicata asupra distribuției D (o servovalva sau o
valva proporționala). Scoaterea din poziția neutra a
plunjerului servovalvei, sub acțiunea erorii a, permite sursei hidraulice S sa alimenteze organul de
execuție E, care modifica starea mecanismului acționat pana
in momentul in care marimea z
corespunde marimii i, respectiv a =
i - r = 0.
 Elementele cele mai caracteristice care dirijeaza clasificarea
sistemelor hidraulice de reglare automata:
Elementele cele mai caracteristice care dirijeaza clasificarea
sistemelor hidraulice de reglare automata:
a) Variabila de intrare. In cazul in
care intrarea de comanda i variaza
dupa un program stabilit, iar intrarea perturbatoare i are o variație mai degraba
intamplatoare, sistemul hidraulic de reglare automata este numit,
convențional, progamator automat.
In opoziție cu acesta, sistemul la care i reprezinta
o valoare fixa, de referința, iar pentru p se
prelimineaza variații pe care sistemul trebuie sa le
inlature in vederea menținerii permanente a unei ieșiri z
constante - la nivelul prescris de i - sistemul hidraulic de reglare
automata este numit, de asemenea convențional, regulator automat.
b) Variabila de ieșire. In
funcție de natura parametrului reglat, pot fi intalnite programatoare sau
regulatoare de viteza, moment, deplasare, putere, temperatura etc.
c) Variabila de reacție. In
cazul in care variabila r se
manifesta local, sistemul hidraulic de reglare automata este, de fapt
un amplificator hidraulic. Invers, daca variabila r este prelevata de la nivelul mecanismului acționat,
sistemul hidraulic de reglare automata devine un servosistem bazat pe
folosirea unei servovalve, care regleaza automat poziția mecanismului
acționat, sau prin folosirea unei servopompe care regleaza automat
viteza mecanismului acționat.
d) Natura variabilelor de intrare - reacție. Sub acest aspect, sistemele
hidraulice de reglare automata pot fi mecanice (i și r
sunt marimi mecanice sau manuale), electrice (i și r sunt marimi electrice) sau
electromecanice (i marime electrica și r marime mecanica, sau
invers).
Sugestii metodologice:
UNDE PREDAM?
Continutul
poate fi predat in laborator sau intr-o sala care are videoproiector.
CUM PREDAM?
Se
poate utiliza: videoproiectorul, retroproiectorul, planse tematice.
Se recomanda utilizarea fiselor de lucru pentru elevi pentru
activitatile de fixare a noilor cunostinte.
Prezentare prin expunere, conversatie euristica, problematizare, demonstrație,
observatie
dirijata etc.
Se recomanda efectuarea unei lucrari de
laborator pentru cunoașterea principiului
de funcționare a unui sistem de reglare automata cu echipamente de
execuție hidraulice.
ORGANIZAREA CLASEI:
Clasa poate fi organizata frontal sau pe grupe de
4 - 6 elevi, in functie de nivelul clasei.
EVALUAREA CUNOSTINTELOR:
 Se realiza prin fise de
evaluare individuala in care elevul sa recunoasca fazele unui
proces automatizat cu elemente de execuție hidraulice.
Se realiza prin fise de
evaluare individuala in care elevul sa recunoasca fazele unui
proces automatizat cu elemente de execuție hidraulice.
Numele elevului
Numele
profesorului: _____ _______ ______ __________
|
Competente care trebuie
dobandite
|
Activitati efectuate
si comentarii
|
Data activitatii
|
Evaluare
|
|
Bine
|
Satisfacator
|
Refacere
|
Examineaza
SRA
cu elemente de executie electropneumatice
|
Grupul de
pregatire a aerului
Motoare pneumatice
Distribuitoare
Drosele, supape
Aparate pneumatice speciale
Parametri
tehnico - funcționali
Schema de
acționare pneumatica
Funcționarea SRA cu elemente de
execuție pneumatice
|
|
|
|
|
Examineaza
SRA
cu elemente de executie electrohidraulice
|
Motoare
hidraulice
Aparate
hidraulice distribuitoare, supape, aparate speciale
Parametrii tehnico - funcționali
Scheme de
acționare hidraulica
Funcționarea SRA cu elemente de
execuție hidraulice
|
|
|
|
|
|
Comentarii
|
Prioritati de dezvoltare
|
|
Competente care urmeaza sa fie
dobandite (pentru fisa
urmatoare)
|
Resurse necesare
|
- Competente care
trebuie dobandite
Aceasta fisa de inregistrare este facuta pentru a
evalua, in mod separat, evolutia legata de diferite competente.
Acest lucru inseamna specificarea competentelor tehnice generale
si competentelor pentru abilitati cheie, care trebuie
dezvoltate si evaluate. Profesorul poate utiliza fisele de lucru
prezentate in auxiliar si/sau poate elabora alte lucrari in
conformitate cu criteriile de performanta ale competentei vizate
si de specializarea clasei.
- Activitati
efectuate si comentarii
Aici ar trebui sa se poata inregistra tipurile de
activitati efectuate de elev, materialele utilizate si orice
alte comentarii suplimentare care ar putea fi relevante pentru planificare sau
feed-back.
- Prioritati
pentru dezvoltare
Partea inferioara a fisei este conceputa pentru a
mentiona activitatile pe care elevul trebuie sa le
efectueze in perioada urmatoare ca parte a viitoarelor module. Aceste
informatii ar trebui sa permita profesorilor implicati
sa pregateasca elevul pentru ceea ce va urma.
- Competentele care
urmeaza sa fie dobandite
In aceasta casuta, profesorii trebuie sa inscrie
competentele care urmeaza a fi dobandite. Acest lucru poate implica
continuarea lucrului pentru aceleasi competente sau identificarea
altora care trebuie avute in vedere.
Aici se pot inscrie orice fel de resurse speciale solicitate: manuale
tehnice, retete, seturi de instructiuni si orice fel de
fise de lucru care ar putea reprezenta o sursa de informare
suplimentara pentru un elev care nu a dobandit competentele cerute.
Nota: acest format de
fisa este un instrument detaliat de inregistrare a progresului
elevilor. Pentru fiecare elev se pot realiza mai multe astfel de fise pe
durata derularii modulului, aceasta permitand evaluarea precisa
a evolutiei elevului, in acelasi timp furnizand informatii
relevante pentru analiza.
Anton, V. ș.a. (1978). Hidraulica
și mașini unelte. București: Editura Didactica și
Pedagogica
Dobrescu, T. (1998). Bazele Cinematicii Roboților
Industriali. București: Ed. Bren
Dobrescu, T. (2003). Incercarea si
Receptia Robotilor Industriali. București: Ed. Bren
Dorin, Al. Dobrescu, T. Bucuresteanu, A. (2007). Actionarea Hidraulica a Robotilor Industriali. București:
Ed. Bren
Dorin, Al. Dobrescu, T. (2002). Actionarea Pneumatica a Robotilor.
București: Ed. Bren
Dorin, Al. Bendic, V.
Dobrescu, T. (2002). Roboti
Industriali in Constructie Modulara. București: Ed. Bren
Dumitrache, I. ș.a. (1982). Automatizari
si echipamente electronice. București: Editura Didactica și Pedagogica
Dumitrache, I. (1980). Tehnica reglarii automate. Bucuresti: Editura Didactica și Pedagogica
Dumitrache, I. ș.a. (1993).
Automatizari electronice. Bucuresti: Editura Didactica și Pedagogica
Enciu, G. (2008). Sisteme de Alimentare - Transport - Transfer.
București: UPB
Garlasu, Șt. s.a. (1982). Electronica si automatizari
industriale. București: Editura Didactica si Pedagogica
Hilohi, S. s.a. (2004). Elemente de comanda si control pentru actionari
si sisteme de reglare automata. București: Editura
Didactica si Pedagogica
Ionescu, C. (1982). Automatizari.
Bucuresti: Editura Didactica și Pedagogica
Ivan, M. ș.a. (1980). Mașini
unelte și control dimensional. București: Editura Didactica
și Pedagogica
Lazea, Gh. (1982). Echipamente de automatizare pneumatice
si hidraulice -indumator de laborator. Cluj - Napoca: Lito IPCN
Mares, Fl. s.a.
(2002). Elemente de comanda si
control pentru actionari si sisteme de reglare automata.
București: Editura Economica - Preuniversitria
Mazilu, I. ș.a. (1982). Sisteme
hidraulice automate. București: Editura Academiei Republicii
Socialiste Romania
Marinoiu,
V. (1980). Robinete de reglare. Bucuresti: Editura Didactica și Pedagogica
Nițu, C. ș.a. (1983). Echipamente
electrice si electronice de automatizare. Bucuresti: Editura
Didactica și Pedagogica
Nicolescu, A. (2008). Implementarea
Robotilor Industriali in Sistemele de Productie. București: UPB
Popescu, Șt. ș.a. (1977). Acționari
și automatizari. București: Editura Didactica și
Pedagogica
Tertisco, M. ș.a. (1992). Automatizari
industriale continue. București: Editura Didactica si Pedagogica