Binarizarea imaginilor
Majoritatea detectoarelor de fronturi produc o
matrice de amplitudini a fronturilor dintr-o imagine. Valorile mari indica
fronturi.
Multe metode de extragere a caracteristicilor
din imagini folosesc o reprezentare binara a imaginii, obtinuta
pe baza matricii de amplitudini a fronturilor. Astfel, daca a(k , l)
este matricea amplitudinilor, atunci imaginea binara, B(k , l) este
:
 unde T este o valoare prag.
unde T este o valoare prag.
Valoarea T poate fi aleasa inspectand histograma imaginii, a(k
, l), astfel incat numai un mic procent din elementele matricei a sa aiba valoarea >= T.
In acest caz, operatia de binarizare este globala, deoarece T
este ales pe baza unei informatii globale si operatia se
efectueaza peste intreaga imagine.
In multe cazuri imaginea
contine regiuni cu proprietati statistice diferite. Binarizarea
globala poate produce frontiere subtiri in unele regiuni si late sau
intrerupte in altele. In aceste cazuri este de dorit o binarizare adaptata
local, adica :
unde T(k,l) este pragul adaptat local. O
metoda de a-l obtine consta in calculul mediei aritmetice locale in matricea amplitudinilor
produsa de detectorul de fronturi :
 , unde p este un procent care indica
nivelul pragului peste media
locala.
, unde p este un procent care indica
nivelul pragului peste media
locala.
Deci, pragul difera de la pixel la pixel in
functie de media amplitudinilor fronturilor din vecinatatea
pixelului.
Transformata Hough :
detectia liniilor drepte din imagini
Transformata Hough foloseste matricea B,
obtinuta prin binarizarea matricei a a amplitudinilor fronturilor.
Fie o imagine de N1xN2
pixeli. Cea mai simpla abordare a determinarii liniilor drepte este
de a gasi linii determinate de perechi de pixeli si apoi a gasi
pixeli din imagine care apartin acestor linii. Numarul maxim de linii posibile
este N(N-1) /2, unde N = N1
x N2. In cazul
cel mai defavorabil, fiecare pixel este verificat daca apartine uneia
dintre cele N(N-1) /2 linii. Deci, complexitatea calculului este O(N3),
ceea ce face ca metoda sa nu poata fi aplicata in practica.
Transformata Hough utilizeaza o
reprezentare parametrica a liniilor pentru reducerea
complexitatii calculului cautarii lor in imagini :

In spatiul parametric (a , b) fiecare linie
este reprezentata printr-un singur punct (a , b).
Fie o linie care trece prin 2 puncte (x1 ,
y1), (x2 , y2) :
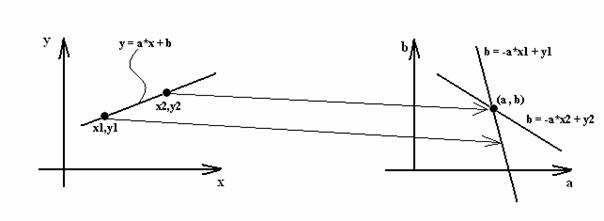
Liniile care trec prin (x1 , y1)
se reprezinta in spatiul parametric prin linia b = - a*x1
+ y1 iar cele care trec prin (x2 , y2) se
reprezinta prin linia b = - a*x2 + y2 .
Intersectia acestor 2 linii din spatiul parametric determina in
mod unic dreapta care trece prin (xi , yi), i = 1, 2.
Pentru detectia liniilor drepte
se poate proceda astfel :
Se discretizeaza spatiul parametric si se
reprezinta printr-o matrice P, astfel incat P[i][j]
corespunde
unui punct (aj , bi)
a1<= a <= aK , aj
= a1 + j*da
b1<= b <= bL, bi
= b1 + i*db
Se initializeaza elementele matricei P cu zero.
Pentru fiecare pixel (x, y), cu B(x , y) = 1
// se formeza ecuatia b = - a*x + y
pentru fiecare a1<= am <= ak
// ( am=a1 +
m* da)
bm = - am*x + y
i = (bm - b1)/(bL
- b1) * (L-1)
P[i][m] ++;
3. Pentru fiecare element al matricei P, P[i][j]
daca P[i][j] >= T atunci
// in imagine exista dreapta y = a*x + b, unde a = a1 + j*
da, b = b1 + i*db
P[i][j] - numara
intersectiile liniilor care trec prin (a , b) si indica
numarul de pixeli care satisfac ecuatia
y = a*x + b.
Precizia
metodei depinde de pasul de discretizare a spatiului (a , b), deci de
marimea matricei P.
Complexitatea
calculului transformatei Hough este O(k*N), unde k
este numarul de subintervale pe axa a
iar N este numarul de pixeli din imaginea de intrare.
Utilizarea ecuatiei parametrice y = a*x + b produce dificultati in reprezentarea
liniilor verticale ( a-> ∞).
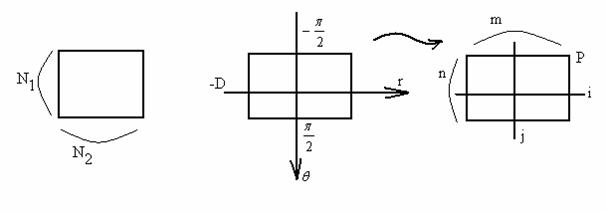
O reprezentare mai buna este
reprezentarea polara :
r = x* cos( ) + y* sin(
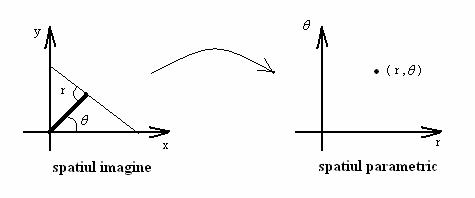
O linie care trece prin (x1 , y1)
reprezinta o curba sinusoidala, r = x1* cos( ) + y1* sin(
in spatiul parametric (r,
θ).
Puncte colineare, (xi
, yi), din imagine, corespund intersectiilor sinusoidelor
din spatiul parametric.
Deci,
punctele de intersectie definesc liniile drepte din imagine.
Pentru o imagine de N1xN2
pixeli,
 .
.
Discretizarea spatiului parametric :
-
intervalul  se imparte in n subintervale;
se imparte in n subintervale;
-
intervalul [ -D, D ] se imparte in m subintervale, unde 
Fie
P[n][m] matricea in care se memoreaza punctele grilei spatiului
parametric.
pentru  =>
=> 
pentru  =>
=> 
Se prelcalculeaza valorile functiilor sin
si cos pentru valorile discrete ale lui :
float
*COS, *SIN, t;
for (
i=0; i<n; i++)
Implementarea
transformatei Hough
void
Hough(imagine
B,//matricea binara a
amplitudinilor
int P[N][M],
int n, int m,
int N1, int
N2
float *COS , float *SIN,
int T,
imagine out
}
//Se calculeaza transformata Hough inversa
(din spatiul (r , θ) in (x , y))
//Pentru fiecare element P[k][l] >
T, se inscrie in matricea out, sub forma de pixeli = 1, //linia dreapta
corespunzatoare elementului (k , l)
//Se efectueaza operatia and
intre rezultatul transformatei si matricea de intrare
for(k = 0 ; k < n ; k++
for(l
= 0 ; l < m ; l++)
}
}
Anumiti detectori de fronturi produc nu numai
marimea frontului ci si directia frontului, Φ(x , y).
Informatia directionala
poate fi utilizata pentru a reduce calculele in transformata Hough.
Astfel, diferentiind in raport cu
x ambele parti ale ecuatiei :
r = x* cos( ) + y* sin(
rezulta:

Directia frontului in (x , y) este 

Deci :
Rezulta ca pentru fiecare
pixel B[k][l] = 1, numai un singur element al matricei P trebuie sa fie actualizat : P[iθ][jθ],
unde :
= FI[k][l], - FI este matricea
directiei frontului
i (θ/п
+ 0.5)(n-1)
r = l* COS[i ] + k* SIN[i
jθ = (int) r
Complexitatea calculului transformatei Hough se reduce
]n acest caz de la O(k*N) la O(N).
Transformata Hough se poate
generaliza pentru a detecta orice curba parametrica. Metoda este practica numai
pentru curbe cu un numar mic de parametri. De exemplu, pentru cerc :

parametrii sunt r, a , b. Este
necesara o matrice P tridimensionala, P(r , a , b).

