Motorul pas cu pas
Ce este un motor pas cu pas?
Este un motor brushless, sincron care transforma
impulsurile de comanda in miscare de rotatie. Acestea pot
imparti o rotatie completa de 360˚ a axului intr-un
numar discret de pasi. O caracteristica importanta care il
diferentiaza de motorul DC este faptul ca puterea consumata
este constanta, independenta de cuplul rezistiv. Puterea este
egala cu produsul dintre viteza unghiulara si cuplu, ceea ce
inseamna ca daca se doreste cuplu mare viteza trebuie sa
scada, iar la viteze mari cuplul este mic.
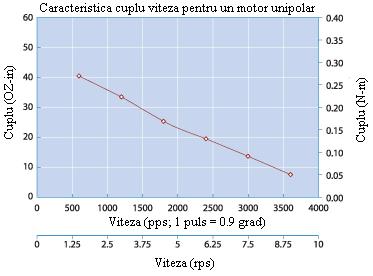
Fig1: Caracteristica cuplu viteza
Observatie
Motoarele pas cu pas nu se desfac, deoarece dupa reasamblare nu vor mai
functiona la parametri nominali. Exista doua explicatii: magnetii isi pierd
repede proprietatile magnetice daca circuitul magnetic nu este
inchis (in cazul in care rotorul este indepartat din carcasa motorului);
intrefierul isi modifica valoarea, ceea ce duce automat la
modificarea caracteristicilor motorului.
Tipuri constructive:
Exista trei tipuri de motoare pas cu pas:
a) Motoare cu reluctanta variabila (VR): Rotorul este realizat din fier moale si cu
infasurarile pe stator. Realizeaza miscari de
rotatie ale axului intre 5˚ si 15˚ cu o viteza
ridicata, dar nu isi poate mentine pozitia axului pe durata
lipsei tensiunii de alimentare a bobinelor din care este realizata
infasurarea satorica.
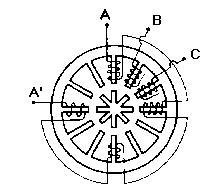
Fig2: Motor pas cu pas cu reluctanta
variabila
b) Motoare cu magneti permanenti (PM): La acest tip constructiv infasurarile
sunt realizate pe stator dar rotorul este realizat din magneti permanenti
fara dinti, magnetizati perpendicular pe axa care
separa polii. Daca bobinele sunt energizate secvential rotorul
se va roti prin atractie magnetica. Aceste motoare realizeaza
miscari ale axului de 45˚ sau 90˚ cu un cuplu ridicat dar la
viteze de rotatie mici.
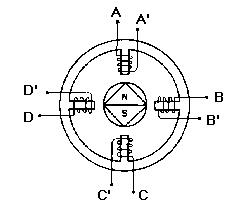
Fig3: Motor pas cu pas cu magneti
permanenti
c)
Motoare hibride:
Sunt o combinatie a primelor doua tipuri constructive.
Functioneaza la viteze mari si cuplu dinamic mare. Beneficiaza
si de asa numitul "detent torque", adica un cuplu care
asigura mentinerea fixa a pozitiei axului si pe durata
lipsei energizarii bobinelor.
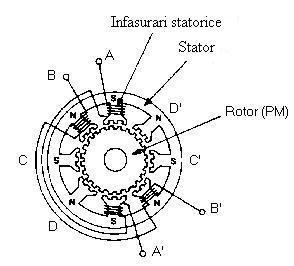
Fig4: Motor pas cu pas hibrid
In figura de mai jos se poate vedea o sectiune
printr-un motor hibrid.
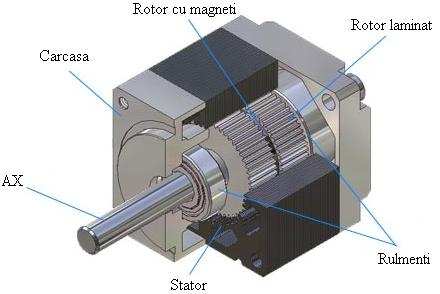
Fig5:
Motorul pas cu pas hibrid
Clasificarea dupa tipul
infasurarilor din stator:
a) Motoare pas cu pas unipolare
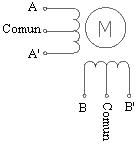
Fig6: Motorul pas cu pas unipolar
In figura de mai sus se poate observa
ca statorul e compus din cate doua bobine pe pol, care au unul din inceputuri
legate impreuna. Putem privi aceste infasurari si ca o
bobina pe pol, dar cu priza mediana. La acest tip constructiv
circuitul de comanda este simplu, fiind nevoie doar de un element de
comutatie pentru fiecare bobina, deoarece pentru a obtine
miscarea de rotatie a axului motorului sensul curentului prin
bobinele din statorul motorului nu trebuie schimbat. Daca se lasa
neconectate inceputurile comune ale bobinelor, motorul pas cu pas unipolar
poate fi privit ca un motor bipolar.
b)
Motoare pas cu pas bipolare
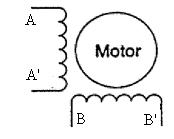
Fig7: Motorul pas cu pas bipolar
Acest tip constructiv de motor are o
infasurare pe pol. Pentru a obtine miscarea de rotatie
a axului, sensul curentului prin bobine trebuie schimbat, si de aici apare
si necesitatea unui circuit de comanda mai complex, de obicei o punte H
utilizata si la comanda motoarelor de curent continuu in doua
cadrane. La aceeasi greutate motoarele bipolare dezvolta un cuplu mai mare
decat cele unipolare.
c)
Motoare pas cu pas "8 - lead"
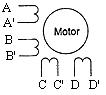
Fig8: Motorul pas cu pas "8 - lead"
In realitate
acestea nu constituie o categorie aparte dar se diferentiaza prin
faptul ca au 8 fire, adica 4 bobine (2 pe pol) cu ambele capete accesibile
la exterior. Prin diverse conexiuni pot fi folosite ca si motoare
unipolare sau bipolare dupa cum urmeaza:
Unipolare
Bipolare
in serie: Se obtine un curent mai mic consumat de motor deoarece
inductanta bobinelor se dubleaza si se obtine un cuplu ridicat la
viteze mici.
Bipolare
in paralel: Se obtine un cuplu mai
mare la viteze mari dar in acelasi timp si curentul prin motor va
creste.
Bipolar
cu o singura bobina pe faza: Se va folosi o singura bobina
pe pol.
Fig9a: Conexiunea
serie Fig9b:
Conexiunea paralel
Comanda motoarelor pas cu pas unipolare:
Trebuie
spus de la inceput ca desi e cel mai simplu si cel mai ieftin
mod de comanda a unui motor pas cu pas, se obtine un cuplu cu
aproximativ 30% mai mic decat in cazul unui motor bipolar.
Acest tip de driver poarta numele de
L/R driver sau driver in tensiune constanta. Asta inseamna ca
pentru energizarea bobineor se foloseste o tensiune constanta.Valoarea
maxima a curentul care strabate infasurarile depinde astfel de rezistenta
ei si de tensiune I=U/R. Inductanta
bobinei determina variatia maxima in timp a curentului di/dt=UL.
Astfel viteza maxima cu care se poate comanda un motor pas cu pas unipolar
cu un astfel de driver depinde de inductanta L a infasurarii,
pentru ca peste o anumita viteza curentul nu va mai tine
"pasul" cu tensiunea. Se poate aduce totusi o imbunatatire
unui astfel de driver prin modificarea partii
electronice (care se mai complica putin) si folosirea o doua
surse de tensiune. Prima sursa de tensiune, de valoare mai mare decat cea
nominala, va fi folosita pentru alimentarea infasurarii
pentru o perioada scurta, doar pentru a creste viteza de
variatie a curentului pana acesta ajunge la valoarea sa nominala.
In acest moment prima sursa de tensiune este decuplata iar bobina va
fi alimeatata in continuare de cea de-a doua sursa de tensiune (de valoare
nominala) care va mentine curentul constant (la valoarea maxima)
in restul perioadei cat bobina este energizata.
Partea de forta, driver-ul, este
alcatuit dintr-un element de comutatie pentru fiecare bobina, iar o
schema completa este prezentata in figura de mai jos:
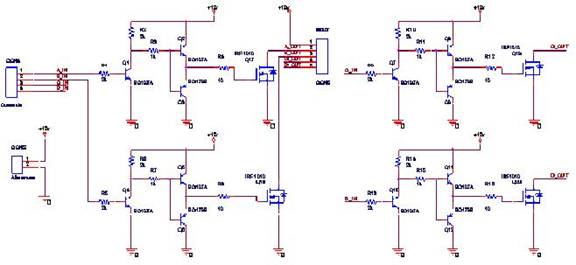
Fig10: Schema electrica a unui driver pentru
motorul pas cu pas unipolar
In schema de mai sus elementul de
comanda este reprezentat de tranzistori C-MOS, care rezista la
curenti mari. Trebuie alesi tranzistori cu rezistenta
Drena-Sursa (RDS ) cat mai mica astfel incat si puterea
disipata pe ei sa fie cat mai mica.
Comanda se va aplica la intrarile
A_IN, B_IN, C_IN si D_IN corespunzatoare cate unei bobine. Ea se
poate aplica cu ajutorul unui microcontroler (patru pini folositi ca
si iesiri digitale) sau cu ajutorul portului paralel al PC-ului. Daca
la una din intrari se va aplica 1 logic atunci elementul de comanda
(tranzistorul C-MOS) va comuta iar bobina va fi energizata. Daca
comanda se face ca si in tabelele de mai jos axul motorului se va roti cu
un pas sau jumatate de pas dupa cum se poate observa.
|
Infasurarea
|
1
|
2
|
3
|
4
|
|
A_IN
|
1
|
0
|
0
|
1
|
|
B_IN
|
1
|
1
|
0
|
0
|
|
C_IN
|
0
|
1
|
1
|
0
|
|
D_IN
|
0
|
0
|
1
|
1
|
Tabelul1: Secventa de comanada pentru un pas
|
Infasurare
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
|
A_IN
|
1
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
|
B_IN
|
1
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
|
C_IN
|
0
|
0
|
1
|
1
|
1
|
0
|
0
|
0
|
|
D_IN
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
Tabelul2: Secventa
de comanda pentru jumatate de pas
Practic pentru comanda "full step" o
rotatie de 360 s a axului motorului e impartita in 200 de
secvente de comanda, obtinandu-se o rotatie a axului,
pentru un impuls de comanda, cu 1.8s.
Comanda "half step" imparte o rotatie
de 360 s a axului motorului in 400 de secvente de comanda,
obtinandu-se o rotatie a axului, pentru un impuls de comanda, cu
0.9s. Fata de comanda "full step" se obtine o precizie mai
ridicata cat si o rotatie mai lina a axului, dar in
acelasi timp va scadea si cuplul motorului.
Daca se doreste o ratie
continua a axului aceasta secventa se va repeta intr-o
bucla infinita (sau intr-o bucla, de un numar de ori egal cu
numarul de pasi doriti).
Comanda motoarelor pas cu
pas bipolare:
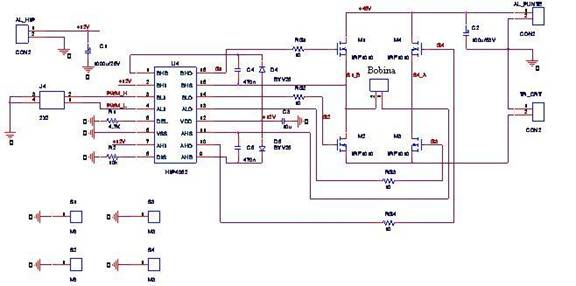
Fig11:
Schema electrica a unei
punti H
Acest tip constructiv de motoare pas cu pas are cate o infasurare
pe fiecare pol. Comanda acestui tip de motor pas cu pas presupune si
schimbarea sensului curentului prin bobina. Astfel nu mai poate fi folosit
un circuit de comanda cu doar un element de comutatie pentru fiecare
dintre cele doua infasurari. Un tip de driver foarte
raspandit este alcatuit din doua punti H, una pentru
fiecare bobina.
Dupa
cum se observa in figura de mai sus o punte H are patru elemente de
comanda, fiind capabila sa asigure inversarea sensului
curentului.
Acest
tip de driver nu mai este considerat in tensiune constanta ci in curent
constant, deoarece actioneaza ca un chopper. La fiecare nou pas o
tensiune mare (in comparatie cu cea folosita la driver-ele L/R) se
aplica infasurari. Acest lucru duce la o crestere
rapida a curentului in bobina (di/dt=U/L). In plus fata de
puntile H driver-ul, in partea sa de comanda contine si
niste comparatoare care monitorizeaza curentul prin
infasurari. Cand acesta depaseste o anumita
limita (valoarea nominala), valoarea tensiunii la bornele bobinei devine
0, iar in momentul in care curentul scade din nou sub acea limita valoarea
tensiunii la borne redevine cea a sursei de alimentare, mentinandu-se
astfel curentul la o valoare "constanta".
Concluzii:
Driver-ele L/R folosite pentru comanda
motoarelor pas cu pas unipolare sunt ieftine si mai simple dar viteza de
comanda este destul de redusa. In schimb driver-ele de tip "chopper"
pot atinge o viteza de comanda mai ridicata. In plus motoarele
biploare au un cuplu mai ridicat cu aproximativ 30-40% decat cele unipolare.
https://en.nanotec.com/steppermotor_animation.html

