SISTEME
HIDROSTATICE AUTOMATE
Generalitati, clasificare.
Un sistem automat de actionare, realizeaza o
corespondenta - dupa o lege prestabilita - dintre o marime independenta aplicata
la intrare, denumita marime de comanda si marimea
rezultata la iesire, dependenta, denumita marime
comandata. Transmiterea energiei de la locul unde se exercita
marimea de intrare pana la locul unde se manifesta marimea
comandata este unidirectionala (intrare - iesire), iar semnalul care parcurge circuitul
poate lua succesiv diferite aspecte fizice.
0 prima clasificare a
sistemelor automate, se face in raport cu tipul legaturii dintre
elementul sau dispozitivul de automatizare
si elementul de executie. Exista astfel sisteme cu circuit
deschis si sisteme cu circuit inchis.
Sistemele automate cu circuit deschis, sau de comanda, cuprind in structura
generala un

Fig. 1.
traductor de intrare, care genereaza
marimea de intrare x, un amplificator, un element de
executie, care produce marimea
de executie x, si instalatia automatizata, la intrarea
careia se exercita marimea de executie x, iar la
iesire, se obtine marimea de iesire 2. Daca traductorul de intrare lipseste, marimea de comanda
si marimea de intrare coincid.
Schema prezentata in figura 1
pune in evidenta caracteristica
fundamentala a sistemelor deschisa, aceea a inexistentei controlului asupra dependentei
dintre marimea de comanda
si cea comandata. Astfel, un
sistem deschis, nu est sensibil la eroarea sa.
Sistemele automate in circuit inchis, care se mai numesc sisteme de reglare automata sau servosisteme, controleaza in mod permanent, si determina prin structura lor,
indeplinirea relatiei de dependenta
dorita intre marimea de
intrare sl cea de iesire. Legatura
directa , de la
intrarea la iesirea sistemului, se completeaza cu o legatura inversa de la
iesire la intrare, numita cale sau bucla de reactie, iar circuitul inchis este numit uzual
bucla de reglare.
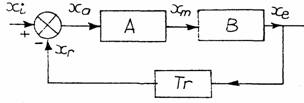
Fig. 2
Calea de reactie cuprinde un lant de
elemente care trebuie sa realizeze in fiecare moment evaluarea marimii de iesire,
compararea ei cu marimea
prescrisa si actiunea asupra comenzii.
Controlul prin intermediul caii
de reactie, presupune un element
functional suplimentar propriu sistemelor de reglare automate: elementul de comparatie. Acesta are evident doua intrari, la
care se aplica xi - marimea de intrare a sistemului - si marimea
transmisa prin calea de reactie. Daca aceasta din urma are
aceeasi natura fizica cu xi , cea de-a doua intrare este
chiar xe;
daca natura fizica difera, xe se converteste in prealabil
ou an traductor de reactie Tr, in marimea de reactie xr , ce se compara apoi cu xi. Rezultatul
comparatiei, xi - xr = xa, este semnalul de eroare sau marimea de
actionare. Deoarece xa este in general un semnal de slaba intensitate, el
se amplifica, rezultand un semnal de conducere xc , care se
aplica elementului de executie, ce genereaza marine a de
executie xm
Aceasta, actioneaza la randul ei asupra obiectului reglat. Prin
urmare, datorita legaturii de reactie, sistemul se gaseste
intr-o permanenta stare de tranzitie. Aceasta, si faptul ca
dependentele marimilor sunt in general ne-liniare, complica mult
calculul sistemului de reglare automata. Totodata, starea de
tranzitie poate determina instabilitate, de aceea o alta
problema specifica , este determinarea conditiilor de
stabilitate. In fine, din punct de vedere energetic, majoritatea sistemelor
hidrostatice automate realizeaza si o amplificare de putere.
Clasificarea sistemelor de
reglare automata ( SRA ) se poate face dupa mai multe criterii. In
raport cu sarcina pe care o au de indeplinit , exista:
Sisteme de reglare automata cu consemn fix , cu sarcina
de a mentine marimea reglata la o valoare constanta
independent de perturbatiile care intervin ; marimea de intrare se
numeste, in acest caz, marime de referinta.
Sisteme de reglare cu program, au cu consemn programat, la
care marimea de intrare se programeaza continuu sau in trepte.
Sisteme de urmarire, la care legea de variatie a valorilor parametrului
reglat nu aste impusa dinainte, el trebuind
sa urmareasca continuu variatia unei alte marimi (exemplu, sistemele de copiere
hidraulica ).
Sisteme autoadaptive,
ce mentin un regim do functionare optim ales si prestabilit (de
exemplu, functionare la randament maxim, efort minim etc. ), tinand seama si de caracteristici momentane ale
factorilor exteriori si actiunea lor perturbatoare.
In raport cu tipul actiunii
de comanda exercitate, sistemele automate pot fi:
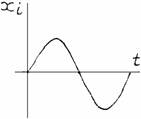
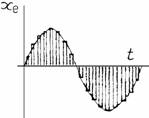
Sisteme continue, la
care o variatie continua a marimii de intrare,
corespunde o variatie de asemeni continua a tuturor marimilor
mecanice sau de alta natura din toate elementele sistemului si
deci, in final, o variatie continua a marimii de iesire.
Fig. 3
Sisteme discontinue, la care variatia continua a marimii de intrare, are drept
corespondent o variatie discontinua
a marimii de iesire; pentru aceasta este suficient ca un element din
lantul transmisiei informatiei sa aiba o actiune discontinua.
In figura 3 se prezinta variatia marimii de iesire in timp,
in cazul sistemelor continue si discontinue.
Luand drept criteriu caracterul
liniar sau ne-liniar al ecuatiilor diferentiale ce descriu functionarea
lor, sistemele automate se
clasifica in liniare si ne-liniare.
In general, marea majoritate a sistemelor automate
(cu atat mai mult cele hidrostatice) sunt ne-liniare, iar studiul lor, in acest caz integrarea ecuatiilor
diferentiale ne-liniare, este extrem de dificila si se
realizeaza prin operatii succesive foarte laborioase.
In practica curenta, sistemele
se studiaza in ipoteza ca sunt liniare ( liniarizate pe
portiuni), iar ecuatiile diferentiale ce le caracterizeaza sunt liniare, cu
coeficienti constanti, determinati direct de parametrii
intrinseci ai elementelor sistemului (care se considera invariabili in
timp).
2. Schema
functionala a sistemului automat
Reprezentarea structurii
functionale ofera o imagine fizica asupra sistemului sau a posibilitatilor
de realizare fizica, respectiv a posibilitatilor da
obtinere a functionalitatii dorite. Schema
functionala ofera proiectantului o cale directa in stabilirea
legaturilor hidraulice, mecanice, precum si a relatiilor
matematice corespunzatoare, aceste operatii putand constitui o prima etapa a analizei.
In figura 4 se prezinta, pentru exemplificare,
schema functionala a celui mal simplu sistem de urmarire, format
din cilindrul mobil , care face corp comun cu distribuitorul Pe tija
sertarasului se aplica semnalul
de intrare xi reprezentat spre exemplu printr-o deplasare
mecanica in sus; prin aceasta, pompa la presiunea p1 =
ct., alimenteaza compartimentul A
al motorului liniar,
|
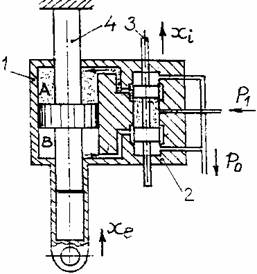
Fig. 4
|
in timp
ce uleiul din B este evacuat la rezervor, la presiunea p0 ( p0
= patm). Intrucat tija pistonului principal este fixata la batiul instalatiei,
alimentarea compartimentului A va determina ridicarea ansamblului si in consecinta a sarcinii cu
distanta xe (marimea de
iesire). Deschiderea
distribuitorului xi - xe, permite deci trecerea
debitului Q catre motor. Deplasarea
continua pana in momentul cand sectiunea de trecere prin
distribuitor este obturata (xi = xe),iar cilindrul
_se opreste.
Legatura de reactie este
reprezentata de reunirea mecanica a corpului cilindrului de
forta si distribuitorului, care se deplaseaza simultan. O
deplasare in sens contrar a tijei de
comanda, va determina coborarea sarcinii. Asadar, deplasarea
sarcinii urmareste deplasarea tijei distribuitorului. Sistemul de
urmarire este in acelasi timp un amplificator de tipul cu sertaras.
|
3 Scheme
bloc a sistemului automat
O schema bloc, este o reprezentare grafica redusa a
relatiei dintre marimea de intrara si aceea de iesire
din sistam, constand dintr-o configuratie specifica a patru tipuri de
elemente grafice: blocuri, puncte de insumare (ramificatii ) si
sageti reprezentand circulatia semnalului.
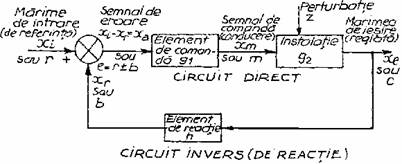
Fig. 5
Intr-o schema bloc,
marimile variabile in timp real se
noteaza cu litere mici, de exemplu, x=x(t), in timp ce variabilele in
domeniul imaginar ( obtinute prin transformarea Laplace), se noteaza
cu litere mari, de exemplu X = X(t). In figura 5, se prezinta
configuratia de baza a unui sistem de reglare automata in domeniul timp real, iar in figura 6,
corespondentul acestei scheme in domeniul imaginar (avand toate marimile
notate in transformata Laplace abreviata).
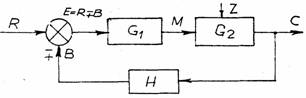
Fig. 6
Marimile G1 , G2
si E sunt functiile de transfer ale componentelor sistemului :G = M/E, G2 = C/M si H = B/C.