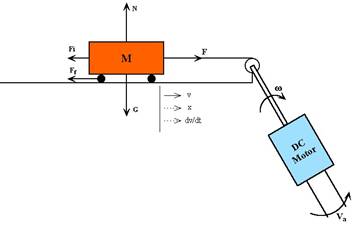
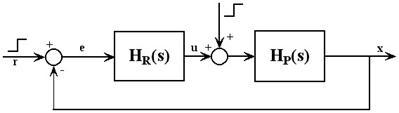
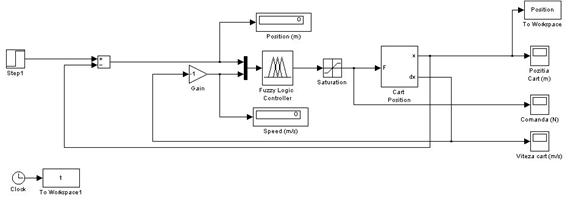
Introducere. Schema bloc a
sistemului decuplat
Echilibrul fortelor asupra cartului
 (1''), unde :
(1''), unde :
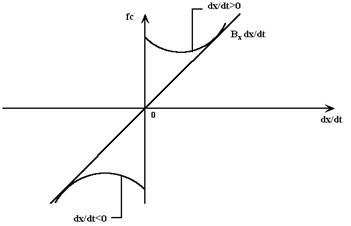
Modelul frecarilor din
sistem
 (2 ), cu
(2 ), cu 
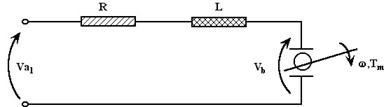
Dinamica elementului de
executie
 ;
; 
 (3'')
(3'')
 ;
;  ;
; ;
; ,
,
2. Modelul matematic asociat sistemului de
pozitionare decuplat
 , unde :
, unde :  ;
;  ;
;  ;
; 
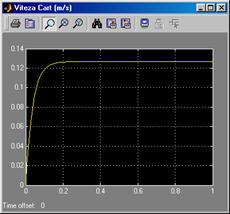
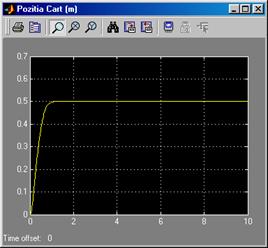
Raspunsul sistemului in bucla deschisa
3. Control conventional de tip PID
 ;
; 
 ;
; ;
;  ;
; =2sec T
=2sec T  si
si  .
.
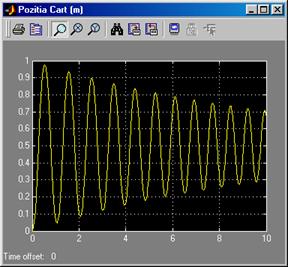
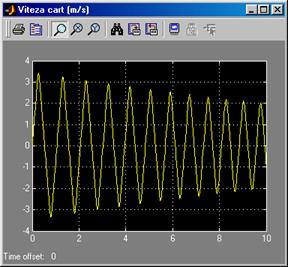
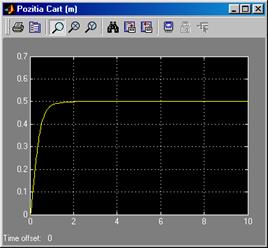
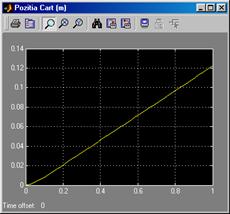
Raspunsul sistemului in
bucla inchisa la referinta treapta si
peturbatie treapta
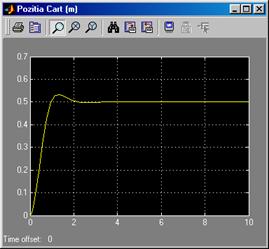
Chiar daca la
referinta de tip treapta sistemul nostru are precizie de reglare
la perturbatie de tip treapta in absenta integratorului din
structura regulatorului avem o mica eroare stationara. Pentru a nu influenta
performantele sistemului in bucla inchisa am ales constanta de timp de
integrare cu un ordin de marime mai mare decat cea de timp de derivare ,
rezultand un algoritm de reglare de tip PID.
4. Control inteligent de tip
fuzzy
O
prima schema de reglare
Baza de reguli este prezentata mai jos :
IF (Theta is NL) then (F is NL) 5. IF (Theta is PS) then (F is PS)
IF (Theta is NM) then (F is NM) 6. IF (Theta is PM) then (F is PM)
IF (Theta is NS) then (F is NS) 7. IF (Theta is PL) then (F is PL)
IF (Theta is ZE) then (F is ZE)
Strategia
fuzzy de control a sistemului decuplat :
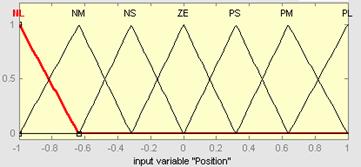
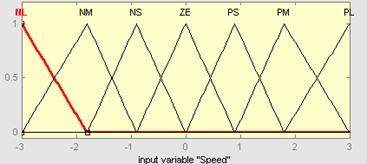
Functiile
de apartenenta pentru pozitia liniara / viteza liniara
:
 Functiile
de apartenenta pentru marimea de comanda
Functiile
de apartenenta pentru marimea de comanda
Baza de reguli :
|
Speed
dx/dt
|
Position (x)
|
|
NL
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PL
|
|
NL
|
NX
|
NX
|
NL
|
ZN
|
NS
|
ZN
|
ZE
|
|
NM
|
NX
|
NL
|
NM
|
ZN
|
ZN
|
ZE
|
ZP
|
|
NS
|
NL
|
NM
|
NS
|
ZN
|
ZE
|
ZP
|
PS
|
|
ZE
|
NM
|
NS
|
ZN
|
ZE
|
ZP
|
PS
|
PM
|
|
PS
|
NS
|
ZN
|
ZE
|
ZP
|
PS
|
PM
|
PL
|
|
PM
|
ZN
|
ZE
|
ZP
|
ZP
|
PM
|
PL
|
PX
|
|
PL
|
ZE
|
ZP
|
PS
|
ZP
|
PL
|
PX
|
PX
|
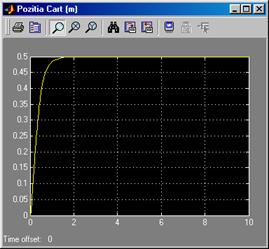
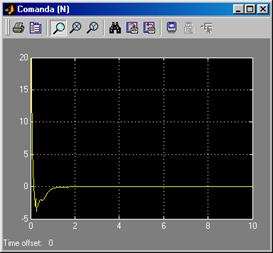
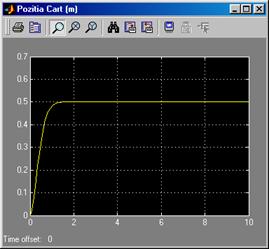
Raspunsul in bucla inchisa al sistemului
Fuzzy : M M'=M+DM
PID : M M'=M+DM