Operatiile aritmetice cu
matrici
In MATLAB operatiile
aritmetice cu matrici (consideram matricile date A si B) au
urmatoarea sintaxa:
» A+B -adunare
» A - B -scadere
» A*B -inmultire
» A/B -impartire la dreapta
» AB -impartire la stanga
» A^B -ridicare la
putere
» A' -transpunere
iar, operatiile aritmetice cu tablouri de valori (consideram
tablourile de valori A si B) au urmatoarea sintaxa:
» A . *B -inmultire
» A . /B -impartire
la dreapta
» A . B -impartire
la stanga
» A . ^B -ridicare
la putere
» A . ' -transpunere
Versiunea MATLAB 6 dispune de functii specifice pentru realizarea
operatiilor aritmetice cu matrici, respectiv, cu tablouri de valori:
a)-Functii MATLAB specifice operatiilor cu
matrici
» A+B - plus(A, B)
» A - B - minus(A, B)
» A*B - mtimes(A, B)
» A/B - mrdivide(A, B)
» AB - mldivide(A, B)
» A^B - mpower(A, B)
» A' - ctranspose(A)
b)- Functii MATLAB specifice operatiilor cu tablouri de
valori
A . *B - times(A, B)
A . /B - rdivide(A, B)
A . B - ldivide(A, B)
A . ^B - power(A, B)
A . ' -
transpose(A)
Adunarea
si scaderea matricilor
Aceste
operatii se pot realiza daca este respectata conditia ca
matricile sa aiba aceeasi dimensiune (exclus cazul in care se
doreste adunarea sau scaderea dintre o matrice si un scalar, unde MATLAB realizeaza operatia in modul urmator: scalarul este
adunat fiecarui element al matricei, fiind respectata regula de
baza, din algebra elementara, in acest caz) .
Ex . 1:
Fie: a= b=
b= ; c=2 .
; c=2 .
Sa se calculeze:a+b; a-b;a+c .
Rezolvare:Cu secventa MATLAB:
» a=[1, 2;3, 4];b=[5, 6;7, 8];c=2;
»
a1=a+b [Enter]
a1 =
6 8
10 12
»
a2=a-b [Enter]
a2 =
-4 -4
-4 -4
»
a3=a+c [Enter]
a3 =
3 4
5 6
Ex . 2:
Fie: m= n=
Sa se calculeze: M=m+n
Rezolvare:
Cu secventa MATLAB
» m=[1, 2;3, 4];n=[pi, sqrt(2), 4^(1/3);exp(log10(8)), log(7), 1-exp(1)] ;
» M=m+n
Rezultatul afisat de MATLAB este:
??? Error using ==> +
Matrix dimensions must agree .
(Eroare
la utilizarea operatorului ==> " + "
Dimensiunile matricelor trebuie sa fie identice
In
MATLAB, versiunea 6 este posibila adunarea unor matrici ale caror
elemente sunt caractere alfanumerice, declarate ca simboluri . De exemplu, fie
doua matrici :  si
si  . Pentru a se calcula suma X=B+A, se declara elementele
matricelor, ca simboluri literale:
. Pentru a se calcula suma X=B+A, se declara elementele
matricelor, ca simboluri literale:
» syms a11 a12 a13 a21 a22 a23 a31 a32 a33 b11 b12 b13 b21 b22 b23 b31 b32 b33;
apoi se declara matricele A, respectiv B:
» A = [a11 a12 a13; a21 a22 a23; a31 a32 a33]
A =
[ a11, a12, a13]
[ a21, a22, a23]
[ a31, a32, a33]
» B=[b11 b12 b13; b21 b22 b23; b31 b32 b33]
B =
[ b11, b12, b13]
[ b21, b22, b23]
[ b31, b32, b33]
Cu secventa MATLAB urmatoare se determina
matricea X:
» X=A+B
X =
[ a11+b11, a12+b12, a13+b13]
[ a21+b21, a22+b22, a23+b23]
[ a31+b31, a32+b32, a33+b33]
Nota: De observat modul de afisare a matricilor simbolice: fiecare
linie este incadrata intre paranteze drepte .
Produsul vectorial
si produsul scalar al doi vectori
Produsul vectorilor (matrici cu o
singura linie, respectiv o singura coloana), este definit diferit
decat pentru matrici . Astfel doi vectori (a, b), avand aceeasi lungime, se pot inmulti in orice
ordine : a*b, respectiv b*a . De exemplu, considerand doi
vectori dati prin componente :
»
a=[1;2;3]
a =
1
2
3
» b=[5, 6, 7]
b =
5 6 7
produsul
vectorial al acestora este :
» prod_vect=a*b
prod_vect =
5 6 7
10 12 14
15 18 21
iar produsul
scalar al celor doi vectori este :
» prod_scalar=b*a
prod_scalar =
38
Daca vectorii (a, b) sunt dati simbolic:
» syms a11 a21 a31 b11 b12 b13
» a_simbolic=[a11 ;a21; a31]
a_simbolic =
[ a11]
[ a21]
[ a31]
» b_simbolic=[b11, b12, b13]
b_simbolic =
[ b11, b12, b13]
atunci produsul vectorial, respectiv produsul scalar, al
celor doi vectori sunt:
» prod_vect_simbolic=a_simbolic*b_simbolic
prod_vect_simbolic =
[
a11*b11, a11*b12, a11*b13]
[
a21*b11, a21*b12, a21*b13]
[
a31*b11, a31*b12, a31*b13]
» prod_scalar_simbolic=b_simbolic*a_simbolic
prod_scalar_simbolic =
a11*b11+a21*b12+a31*b13
Produsul matricilor
Produsul a doua matrici se
simbolizeaza cu caracterul " *
" (tastele " Shift + 8 " de pe tastatura literala, apasate simultan, sau caracterul corespunzator de pe tastatura numerica) .
Pentru ca produsul a doua matrici sa se poata realiza este
necesar a se indeplini urmatoarea conditie esentiala: numarul
de coloane ale primei matrici sa fie egal cu numarul de linii ale
celei de-a doua matrici .
Astfel, daca se inmultesc doua matrici a(m, n) si b(n, p) se
obtine o matrice c(m, p),
aceasta regula aplicandu-se si in cazul inmultirii unei
matrici cu un vector-linie sau vector-coloana) .
Ex . 3:
Fie: 
 ; c=2 .
; c=2 .
Sa se calculeze produsele : a∙b; b∙a; a∙c;
b∙c .
Rezolvare:Cu secventa MATLAB:
»a=[1, 2;3, 4;5, sqrt(8);i, pi];b=[sqrt(3), -3, 2*i, 1-2*i, 7;8, 9, 0, 1, 6];c=2;
» a1=a*b [Enter]
» a2=b*a [Enter]
???
Error using ==> *
Inner matrix dimensions must
agree .
» a3=a*c [Enter]
» a4=b*c [Enter]
se obtin rezultatele:a1; a3; a4 .
Observatie: In cazul
produsului a2=b*a, MATLAB afiseaza mesajul:
??? Error using ==> *
Inner
matrix dimensions must agree .
(intrucat dimensiunile matricelor implicate in produs nu respecta
conditia impusa !
Inmultirea
a doua matrici simbolice, si . , se realizeaza astfel:
-se declara elementele matricelor, ca
simboluri:
» syms a11 a12 a13 a21 a22 a23 a31 a32 a33 b11 b12 b13 b21 b22 b23 b31
b32 b33;
se declara matricele A, respectiv B:
» A = [a11 a12 a13; a21 a22 a23; a31 a32 a33]
A =
[ a11, a12, a13]
[ a21, a22, a23]
[ a31, a32, a33]
» B=[b11 b12 b13; b21 b22 b23; b31
b32 b33]
B =
[ b11, b12, b13]
[ b21, b22, b23]
[ b31, b32, b33]
Cu secventa MATLAB urmatoare se determina
matricea-produs X=A*B:
» X=A*B
X=
[a11*b11+b21*a12+a13*b31, b12*a11+a12*b22+a13*b32, b13*a11+b23*a12+a13*b33]
[a21*b11+b21*a22+a23*b31, b12*a21+a22*b22+a23*b32, b13*a21+b23*a22+a23*b33]
[a31*b11+b21*a32+a33*b31, b12*a31+a32*b22+a33*b32, b13*a31+b23*a32+a33*b33]
Impartirea
la dreapta
Impartirea la dreapta
este simbolizata cu operatorul "/" (slash), si este realizabila numai daca inversa celei de- a doua matrici
exista (determinantul acesteia este nenul) si aceasta
inversa respecta conditia impusa inmultirii
matricelor . Astfel, daca se impart doua matrici a(i, j) si b(m, m)
este necesar ca b-1 sa existe si dimensiunea acesteia
sa respecte conditia m==j .
Impartirea la dreapta, a doua matrici, consta, de fapt, in
rezolvarea ecuatiei X*a=b .
Nota :Se
cunoaste faptul ca o matrice admite inversa numai daca aceasta este patratica si
determinantul este nenul
Exemplu:
Fie: a= b=
Sa se calculeze:a/b; b/a .
Cu secventa MATLAB:
» a=[1, 2;3, 4];b=[5, 6;7, 8];
» a1=a/b [Enter]
a1 =
2 . 0000 -1 . 0000
» a2=b/a [Enter]
a2 =
Exemplu (produsul
matricilor cu dimensiuni ne-adecvate):
Fie: a=; b=
Sa se
calculeze catul : d=a/b .
Cu
secventa MATLAB:
a=[1, 2;3, 4] ; b=[sqrt(3), -3, 2*i, 1-2*i, 7;8, 9, 0, 1, 6] ;
» d=a/b [Enter]
MATLAB va afisa urmatorul raspuns:
???
Error using ==> /
Matrix
dimensions must agree .
Pentru
impartirea la dreapta, a doua matrici simbolice,  si
si  , se procedeaza astfel:
, se procedeaza astfel:
se declara elementele matricelor, ca
simboluri literale
» syms a11 a12 a21 a22 b1 b2;
se declara matricele A, respectiv B:
» A = [a11 a12; a21 a22]
A =
[ a11, a12]
[ a21, a22]
» B=[b1 b2]
B =
[ b1 b2]
Cu secventa, MATLAB, urmatoare se determina
matricea- X=B/A:
» X=B/A
X =
[
-(a21*b2-b1*a22)/(a11*a22-a12*a21), (a11*b2-a12*b1)/(a11*a22-a12*a21)]
Solutiile
sistemului de ecuatii: se obtin cu urmatoarele comenzi
se obtin cu urmatoarele comenzi
» x1 = X(1)
x1 =
-(a21*b2-b1*a22)/(a11*a22-a12*a21)
» x2 = X(2)
x2 =
(a11*b2-a12*b1)/(a11*a22-a12*a21)
Impartirea
la stanga
Operatia
de impartire la stanga este simbolizata cu operatorul "" (backslash), reprezentand, in termeni aritmetici, produsul dintre inversa primei
matrici si cea de-a doua matrice . Astfel, conditia necesara (dar nu suficienta) pentru ca o
matrice a sa se "
imparta " la stanga prin matricea b, este ca matricea a
sa admita inversa si in plus aceasta inversa
trebuie sa indeplineasca si conditia necesara ca
doua matrici sa se poata inmulti . Ca o concluzie, se va
incerca impartirea la stanga, sau la dreapta, a doua matrici, numai in cazul in care cele doua matrici sunt patratice, si
daca matricea, la care se imparte, este nesingulara, conditia
pentru inmultire sa fie indeplinita (numarul de coloane ale
primei matrici egal cu numarul de linii ale celei de-a doua matrici ) .
Ex . 6:
Fie: a= b=
Sa se calculeze:ab; ba .
Cu secventa MATLAB:
» a=[1, 2;3, 4];b=[5, 6;7, 8];
» a1=ab [Enter]
a1 =
-3 . 0000 -4 . 0000
4 . 0000 5 . 0000
» a2=ba [Enter]
a2 =
5 . 0000 4 . 0000
-4 . 0000 -3 . 0000
In
MATLAB, versiunea 6 este posibila impartirea unor matrici ale
caror elemente sunt caractere alfanumerice, declarate ca simboluri . De
exemplu, fie doua matrici, A si B, ale caror elemente sunt date
simbolic A(2x2)=[aij],
B(2x3)=[bik]: si  . Se cere matricea X=B/A .
. Se cere matricea X=B/A .
Cu secventa MATLAB urmatoare se determina
matricea X, ca fiind catul simbolic
al matricilor A si B:
»syms a11 a12 a21 a22 b11 b12 b13 b21 b22 b23;
»A = [a11 a12; a21 a22];
»B = [b11 b12 b13;b21 b22 b23];
»X = AB

Produsul Kronecker
Produsul Kronecker este cea mai mare matrice formata din toate
produsele posibile realizate intre elementele a doua matrici (nu trebuie
confundat "Produsul Kronecker" cu "simbolul Kronecker" sau "delta
Kronecker", a carei exprimare este data de: ) . Aceasta matrice este utilizata in calculul
tensorial, in teoria deformarii elastice, in teoria deformarii
plastice, respectiv in calculele aferente analizei cu elemente finite a
proceselor de deformare plastica si elasto-vasco-plastica a
materialelor . Vectorii spatiali, definiti pe spatiul cu trei
dimensiuni
) . Aceasta matrice este utilizata in calculul
tensorial, in teoria deformarii elastice, in teoria deformarii
plastice, respectiv in calculele aferente analizei cu elemente finite a
proceselor de deformare plastica si elasto-vasco-plastica a
materialelor . Vectorii spatiali, definiti pe spatiul cu trei
dimensiuni  , reprezinta marimi reale, de exemplu marimi
fizice, care contin trei informatii (trei scalari) . Descrierea unui
vector v in baze diferite ai si bi prin coordonatele
respective, nu schimba valoarea sa intrinseca (v se numeste si marime invarianta):
, reprezinta marimi reale, de exemplu marimi
fizice, care contin trei informatii (trei scalari) . Descrierea unui
vector v in baze diferite ai si bi prin coordonatele
respective, nu schimba valoarea sa intrinseca (v se numeste si marime invarianta):

Toate marimile
invariante se numesc tensori
(un exemplu de tensor este tensorul
tensiunilor care, dat prin componente, se reprezinta prin matricea
componentelor, intr-un sistem de axe x, y,
z:  , acesta caracterizand starea
de eforturi unitare, a unui punct situat pe o suprafata oarecare
a corpului supus actiunii unor forte exterioare) . Un scalar este tensor, daca
poate fi scris ca produsul scalar u·v a doi vectori:
, acesta caracterizand starea
de eforturi unitare, a unui punct situat pe o suprafata oarecare
a corpului supus actiunii unor forte exterioare) . Un scalar este tensor, daca
poate fi scris ca produsul scalar u·v a doi vectori:
 , unde
, unde  sunt coordonatele
tensorului in raport cu baza gi .
sunt coordonatele
tensorului in raport cu baza gi .
Alte exemple de tensori si
deviatori:
- Tensorul sferic al tensiunilor


- Deviatorul tensiunilor


- Invariantii eforturilor unitare



care in functie de
tensiunile normale principale  sunt :
sunt :

- Tensorul deformatiilor specifice

Tensorul sferic al deformatiilor


Deviatorul deformatiilor specifice:
 ;
;
Produsul Kronecker se realizeaza cu
functia MATLAB kron(X, Y),
rezultatul fiind obtinut dupa urmatoarea regula de calcul:

De
exemplu, produsul Kronecker al doua matrici  ,
,  este:
este:
» X=[1, 2, 3;4, 5, 6]; Y=[1, 2;3, 4];
» kron(X, Y)
ans =
1 2 2 4 3 6
3 4 6 8 9 12
4 8 5 10 6 12
12 16 15 20 18 24
» kron(Y, X)
ans =
1 2 3 2 4 6
4 5 6 8 10 12
3 6 9 4 8 12
12 15 18 16 20 24
Functia putere atasata unei matrici
Operatia
de calcul a puterii unei matrici se simbolizeaza cu operatorul "^" (Shift + 6;):
A=b^c,
Puterea unei matrici (bc)se
calculeaza ca produs repetat de c
ori al matricei b prin ea insasi:
b^c=b*b*b* . *b
de c ori
Daca b este un scalar iar c
este o matrice atunci calculul puterii  se realizeaza
folosind valorile proprii ale matricei c
respectiv ale scalarului b .
se realizeaza
folosind valorile proprii ale matricei c
respectiv ale scalarului b .
Obs . Operatia are sens numai daca matricea b este patratica iar c un scalar .
Ex . 7:
Fie: a= b=3;c= - 3 . Sa se calculeze:a^b; b^a; a^c
b=3;c= - 3 . Sa se calculeze:a^b; b^a; a^c
» a=[1, 2;3, 4];b=3;c= -3;
» a1=a^b [Enter]
a1 =
37 54
81 118
» a2=b^a [Enter]
a2 =
87 . 8864 127 . 1198
190 . 6797 278 . 5661
» a3=a^c [Enter]
a3 =
-14 . 7500 6 . 7500
10 . 1250 -4 . 6250
Trebuie observat faptul ca a3=a^c, unde c este un scalar negativ, se executa in urmatoarea
ordine: se determina inversa matricei a
dupa care rezultatul se ridica la puterea |c| (valoarea absoluta a scalarului c) .
Transpunerea matricilor
Transpusa unei matrici x(i, j) (i linii si j coloane), este matricea x1(j, i) (j linii si i coloane), si se determina, in MATLAB, folosind, pentru
simbolizarea ope-
ratiei, caracterul apostrof : " '
" . De exemplu, pentru matricea x :
» x=[1, 2, 3;4, 5, 6] ;
transpusa x1 este determinata cu
secventa MATLAB:
»
x1=x' [Enter]
x1 =
Determinantul unei matrici
Obs . Numai matricile patratice
permit calculul determinantului, in timp ce, matricele cu numar de
linii diferit de numarul de
coloane, « tablourile », permit doar calculul « minorilor » .
Calculul determinantului unei matrici se realizeaza cu functia det( ) si se apeleaza cu
sintaxa:
D = det(X)
Ex
Sa se calculeze determinantii urmatoarelor matrici:


 .
.
Cu secventa MATLAB:
» A = [1, 2 ; 3, 4];B = [1, 2, 3 ; 4, 5, 6 ;7, 8, 9] ;
» C=[sqrt(3), -3, 2*i, 1-2*i, 7;8, 9, 0, 1, 6];
» A1 = det(A)
A1
= -2;
» B1 = det(B)
B1
= 0
» C1 = det(C)
In cazul C1 =
det(C), MATLAB returneaza
urmatorul mesaj de eroare (datorat dimensiunii matricei C):
???
Error using ==> det
Matrix
must be square .
??? Eroare la utilizarea functiei det ()
Matricea trebuie sa fie
patratica
In MATLAB versiunea 6, este
disponibil calculul determinantului unei matrici ale carei elemente sunt
simboluri literale declarate cu functia syms . De exemplu, pentru calculul determinantului matricei  se poate utiliza
urmatoarea secventa :
se poate utiliza
urmatoarea secventa :
» syms a b c d;
»D1= det([a, b; c, d])
care returneaza urmatoarea "valoare":
»D1= a*d - b*c
Similar
este cazul matricei  , unde se poate
utiliza urmatoarea secventa:
, unde se poate
utiliza urmatoarea secventa:
» A = sym([2/3 1/3;1 1])
A =
[ 2/3, 1/3]
[ 1, 1]
» r = det(A)
r = 1/3
Obs : Determinantul unei matrici este
utilizabil in consideratii teoretice si in anumite tipuri de calcule
simbolice, dar este, datorita scalarii si erorilor de
aproximare, mai putin utilizabil in calcule numerice .
Calculul inversei
Daca o matrice A este
patratica si nesingulara (determinantul matricei este
nenul), ecuatiile AX = I
si X∙A = I (matricea I fiind matricea unitate) au aceeasi solutie, X . Aceasta solutie se
numeste inversa matricei A, se noteaza cu A-1 si se
calculeaza folosind functia MATLAB inv(A) . Daca matricea A
este patratica si
nesingulara, atunci, fara a considera erorile de aproximare, X = inv(A)*B ar trebui sa fie, cel
putin teoretic, identica cu X = AB
iar, Y = B*inv(A) sa fie
identica cu Y = B/A . Utilizarea
operatorilor aritmetici « impartire la stanga »
si « impartire la dreapta »
este preferata utilizarii inversei matricei, datorita timpului
de calcul mai redus, a . volumului de memorie ceruta si a unor
proprietati de detectie a erorilor mai bune . Prin definitie, inversa unei matrici patratice A(i, i), este matriea A-1, care satisface
relatia:( A)*(A-1)=I, unde
I este matricea unitate (matricea cu
elementele de pe diagonala principala egale cu unitatea, respectiv
celelalte elemente egale cu zero) . Inversa unei matrici se calculeaza cu
functia MATLAB inv (), si se apeleaza cu sintaxa:
Y = inv(X)
Functia se utilizeaza
frecvent pentru rezolvarea sistemelor de ecuatii liniare A*x=b, sau X*A=B solutia sistemului este x=inv(A)*b respectiv x=B*inv(A) .
Ex . 9
Se cere inversa matricei: A = 
Cu secventa MATLAB:
» A = [2, 1 ; -1, 1] ;
» B = inv(A)
B=
Pseudo-inversa
Matricile rectangulare (tablourile de valori) nu admit inverse si nici
calculul determinantilor . Pentru acest tip de matrici se poate utiliza pseudoinversa Moore-Penrose, care se calculeaza cu functia pinv() . De exemplu, pentru matricea  se va calcula
pseudoinversa cu urmatoarea secventa MATLAB :
se va calcula
pseudoinversa cu urmatoarea secventa MATLAB :
»C=[9, 4;2, 8;6, 7] ;
»P=pinv(C)
P =
0 . 1159 -0 . 0729 0 . 0171
-0 . 0534 0 . 1152 0 . 0418
Printr-un
calcul simplu se poate observa ca produsul P*C reprezinta matricea unitate de ordinul doi:
»I=P*C
I=
1 . 0000 0 . 0000
0 . 0000 1 . 0000
in timp ce, produsul C*P este o matrice de ordinul 3x3,
dar nu matricea unitate :
»Q=C*P
Q=
Rangul matricei
O matrice X (m, n), nenula, are rangul k, daca matricea X are un determinant
« minor », de ordin k,
nenul, iar toti minorii de ordin mai mare decat k (daca exista) sunt nuli . Rangul unei matrici este, prin
urmare, un scalar 1 k min(m, n) . Rangul unei matrici reprezinta
numarul de linii sau coloane liniar independente, si se
determina cu functia rank( ) .
Se apeleaza cu una dintre sintaxele:
k min(m, n) . Rangul unei matrici reprezinta
numarul de linii sau coloane liniar independente, si se
determina cu functia rank( ) .
Se apeleaza cu una dintre sintaxele:
r = rank
(X) r
= rank (X, tol)
Functia
rank, apelata cu sintaxa r = rank (X, tol), returneaza
numarul de valori singulare ale lui X,
mai mari decat parametrul optional tol .
Ex . 10
Sa
se determine rangul matricei A = 
Din algebra elementara se cunoaste ca intrucat toti
minorii de ordinul al treilea ai matricei A
sunt nuli:




si, deoarece, exista minori de ordinul al doilea nenuli, A1= , rezulta
ca rangul matricei A este: rang A = 2
, rezulta
ca rangul matricei A este: rang A = 2
Acest rezultat
se obtine cu secventa MATLAB:
» A = [3, 2, -5, 4;3, -1, 3, -3;3, 5, -13, 11];
» k = rank(A)
care returneaza: k=2
Conditionarea unei matrici
Importanta
cunoasterii conditionarii unei matrici decurge din faptul
ca rezultatele obtinute prin calcul numeric corespund intotdeauna
unei probleme perturbate, aceasta datorandu-se, in special erorilor de
rotunjire, a calculelor cu precizie ridicata, respectiv, se datoreaza
sensibilitatii preciziei de calcul in timpul rezolvarii
sistemelor liniare . Determinarea conditionarii are la baza
teoria matematica a perturbatiilor . Se spune ca o functie f(x)
este rau- conditionata
daca pentru un x1
'apropiat' de x,
functia f(x1)
difera 'mult' de f(x) .
Altfel, o functie se spune ca este bine conditionata daca pentru un x1 'apropiat' de x, functia f(x1) este 'apropiata' de f(x) . Trebuie remarcat ca termenii
'apropiat' si 'mult' sunt vagi, motiv pentru care este
necesara utilizarea numerelor de
conditionare .
Numarul de conditionare indica sensibilitatea solutiei unui
sistem de ecuatii liniare fata de perturbatiile generate de
calculele cu coeficientii ecuatiilor (calculul inversei matricei
coeficientilor necunoscutelor, de exemplu), si da indicatii
asupra preciziei rezultatelor la inversarea matricelor si rezolvarea
ecuatiilor liniare . O matrice bine-conditionata este o matrice
relativ insensibila la mici perturbatii .
Pentru un sistem de ecuatii liniare Ax=b,
daca matricea A este
cunoscuta si nu este afectata de erori, dar vectorul B, este afectat, atunci, considerand o perturbare
a acestuia evaluata la marimea  (vectorul perturbatiilor), vectorul
solutie x devine
(vectorul perturbatiilor), vectorul
solutie x devine  , iar sistemul perturbat este :
, iar sistemul perturbat este :
 , sau
, sau  , deci
, deci 
Egalitate, in ultima relatie, se obtine numai pentru anumiti
vectori . Aplicand norma
ambilor membri ai egalitatii Ax=B,
se obtine :
 ,
,
si, folosind cateva calcule
simple de inmultire si identificare, se obtine (presupunand
ca  ) :
) :

in care A-1 este
matricea inversa a lui A,
obtinuta prin calcule afectate de erori de rotunjire (adica  ) . Astfel, pentru o matrice nesingulara A pozitiv definita se
defineste numarul de
conditionare calculat ca raportul dintre cea mai mare si cea
mai mica valoare proprie a
acesteia :
) . Astfel, pentru o matrice nesingulara A pozitiv definita se
defineste numarul de
conditionare calculat ca raportul dintre cea mai mare si cea
mai mica valoare proprie a
acesteia :

In aceste conditii, relatia de estimare a erorii solutiei
devine :

in care  masoara
incertitudinea relativa existenta in vectorul B (de exemplu, daca elementele vectorului B sunt date cu trei cifre semnificative, atunci este de ordinul 10-3 sau 10-4), iar
masoara
incertitudinea relativa existenta in vectorul B (de exemplu, daca elementele vectorului B sunt date cu trei cifre semnificative, atunci este de ordinul 10-3 sau 10-4), iar  reprezinta
incertitudinea relativa existenta in vectorul x, si este determinata de incertitudinea existenta
in vectorul B .
reprezinta
incertitudinea relativa existenta in vectorul x, si este determinata de incertitudinea existenta
in vectorul B .
Daca, atat matricea A cat si vectorul B sunt afectati de erori, atunci
sistemul se scrie sub forma :



Daca vectorul
termenilor liberi este determinat exact si neafectat de erori, iar
matricea A are coeficienti perturbati de erori, atunci
sistemul Ax=B devine :
 ,
,
de unde rezulta :
 sau
sau 
Ultima relatie, aranjata, devine :
 ,
,
pentru care, daca se aplica norma, se obtine :
 sau
sau 
Din aceasta relatie se observa ca incertitudinea din
vectorul solutie x relativa
la  este
marginita de incertitudinea relativa a matricei A, inmultita cu numarul de conditionare al
matricei A .
este
marginita de incertitudinea relativa a matricei A, inmultita cu numarul de conditionare al
matricei A .
In concluzie, daca numarul de conditionare cond . (A) este mare, atunci
perturbatiile mici introduse de A
si/sau B pot introduce perturbatii mari in x (problema
liniara este slab
conditionata, adica solutiile sistemului de
ecuatii sunt foarte evident influentate de erorile de calcul ale
matricei A, respectiv de datele
masurate , adica elementele vectorului B), iar daca numarul de conditionare cond . (A) este mic, atunci perturbatii
reduse introduse de A si/sau B pot induce perturbatii mici in
vectorul solutiei x (problema
liniara este bine
conditionata, adica solutiile sistemului de
ecuatii sunt neinfluentate de erorile de calcul ale matricei A) . Aceste elemente servesc la corectarea
solutiei obtinute din calcul, la alegerea metodei de calcul
(tinand seama de numarul si ordinea operatiilor de
executat), la modul de reprezentare a informatiei numerice in calculator
(in virgula mobila, virgula fixa sau zecimal), la tipul de
aritmetica cerut in programul de calcul, precum si la precizia
impusa calculelor .
Numarul de
conditionare se
determina, in MATLAB, cu functia cond()
si se apeleaza cu sintaxa:
» cond(X)
O functie mai
performanta care permite calculul numarului de conditionare este
rcond() si se apeleaza cu
sintaxa:
» rcond(X)
Functia MATLAB rcond(X) returneaza estimarea
numarului de conditionare al unei matrici X, determinat prin subrutinele LAPACK- Linear Algebra PACKage (exemple de
subrutine de tip LAPACK : DLANGE, DGETRF, DGECON, daca matricea este
reala, respectiv ZLANGE, ZGETRF, ZGECON, daca matricea este
complexa), care reprezinta o biblioteca de subrutine FORTRAN, utilizate de MATLAB pentru rezolvarea problemelor de algebra lineara . In
completare la LAPACK, MATLAB utilizeaza si subrutinele BLAS- Basic Linear
Algebra Subroutines,
care au si rolul de a amplifica viteza de calcul si manevrare a a
matricilor mari, respectiv ale subrutinelor LAPACK . Functiile LAPACK sau BLAS pot fi
apelate prin fisiere MEX ale utilizatorului .
Daca
matricea X este bine
conditionata, rcond are
valoarea aproximativ 1 . 0, iar
daca este slab conditionata, atunci rcond este aproximativ 0, 0 .
Estimarea celui
mai mic numar de conditionare se face cu functia condest(), si se apeleaza cu
sintaxa:
» condest(x)
Ex . :
Calculati numerele de conditionare
pentru sistemul « initial » de ecuatii:

si pentru sistemul 'perturbat':
In MATLAB:
-matricea sistemului initial:
» A1=[6 6 . 917;1 1 . 152];
matricea sistemului
« perturbat » :
» A2=[6 6 . 912;1 1 . 152];
-numerele de conditionare :
» C1=cond(A1); c2=cond(A2)
C1=1 . 7234e+004 c2=inf
» D1=condest(A1); d2=condest(A2)
D1=2, 0845e+004 d2=2 . 7129e+017
» R1=rcond(A1); r2=rcond(A2);
R1=5 . 4453e-005 r2=4 . 1842-018
De aici, rezulta ca sistemul este slab
conditionat . Acest lucru se verifica si prin rezolvarea celor
doua sisteme, cu valori 'apropiate' ale coeficientilor
(pentru care exista diferenta la a patra cifra) :
» A1=[6 6 . 917;1 1 . 152];
» A2=[6 6 . 912;1 1 . 152];
» B=[6 . 543; 1 . 095];
» X1=a1b
X1=[ 7 . 3158 -5 . 4000]
» X2=a2b
X2=[-8 . 1041 7 . 0348]*1 . 0e+013
Conditionarea
slaba a matricei se reflecta in diferentele foarte mari ale
solutiilor: de exemplu, prima solutie, pentru sistemul ne-perturbat,
este x1=7, 3158, in timp
ce pentru sistemulperturbat,
solutia x1= - 8, 1041 ·
1013 .
Ex . :
Se vor determina numerele de conditionare pentru sistemul
« initial » de ecuatii:

respectiv pentru sistemul 'perturbat':

In Matlab, problema se rezolva cu urmatoarea secventa:
» a=[45, 23 . 123;1, 15]; a1=[45, 23 . 124;1, 15];
»d=condest(a)
d =
4 . 8071
» d1=condest(a1)
d1 =
4 . 8072
» r1=rcond(a)
r1 =
0 . 2435
» r2=rcond(a1)
r2 =
0 . 2434
Se
poate, observa ca sistemul este bine conditionat, rezistent la
"perturbatii", iar numerele de conditionare reflecta acest
lucru, prin valorile apropiate, pana la cifra zecimala de ordinul
patru . Rezolvand sistemul de ecuatii, in cele doua variante, se
obtin vectorii x1, respectiv x2:
» b=[2 . 34;3 . 45];
» x1=ab
x1 =
-0 . 0685
0 . 2346
» x2=a1b
x2 =
-0 . 0685
0 . 2346
Dupa rezolvarea sistemelor
de ecuatii (initial si perturbat), s-a obtinut, practic, aceeasi solutie .
Factorizarea matricilor
Factorizarea
reprezinta operatia de trecere de la o multime la multimea
claselor de echivalenta, in raport cu o relatie de
echivalenta data . Factorizarea se aplica, la rezolvarea
sistemelor de ecuatii liniare . In esenta, factorizarea este o
procedura de transformare a unei matrici, in general patratice, intr-o matrice superior triunghiulara (elementele superioare diagonalei
principale sunt diferite de zero, in timp ce, elementele inferioare acesteia
sunt toate egale cu zero) sau una inferior triunghiulara (elementele
inferioare diagonalei principale sunt diferite de zero, in timp ce, elementele
superioare acesteia sunt toate egale cu zero) . Metodele directe pentru
rezolvarea sistemelor (de forma Ax=B), cele mai utilizate, sunt metodele bazate pe procesul de eliminare sau
descompunerea matricei coeficientilor (matricea A) . Astfel, pentru un sistem Ax=B:
 , in care
, in care  , este matricea coeficientilor;
, este matricea coeficientilor;  , este vectorul necunoscutelor;
, este vectorul necunoscutelor;  este vectorul
termenilor liberi, ai sistemului, metoda generala de transformare intr-un
sistem echivalent, "Metoda de eliminare a
lui Gauss", se prezinta in continuare . Prima transformare aplicata sistemului Ax=B, are ca efect eliminarea
necunoscutei x1 din
celelalte n-1 ecuatii, adunand
prima ecuatie la urmatoarele n-1,
este vectorul
termenilor liberi, ai sistemului, metoda generala de transformare intr-un
sistem echivalent, "Metoda de eliminare a
lui Gauss", se prezinta in continuare . Prima transformare aplicata sistemului Ax=B, are ca efect eliminarea
necunoscutei x1 din
celelalte n-1 ecuatii, adunand
prima ecuatie la urmatoarele n-1,
inmultita cu  , obtinandu-se un nou sistem de ecuatii:
, obtinandu-se un nou sistem de ecuatii:  . In a doua transformare, se foloseste a doua
ecuatie, din sistemul
. In a doua transformare, se foloseste a doua
ecuatie, din sistemul  , inmultita cu
, inmultita cu  , pentru eliminarea necunoscutei x2 din ultimele n-2
ecuatii ale acestui sistem, obtinandu-se un nou sistem:
, pentru eliminarea necunoscutei x2 din ultimele n-2
ecuatii ale acestui sistem, obtinandu-se un nou sistem:  . Se observa ca inainte de eliminarea necunoscutei xk, sistemul echivalent, obtinut dupa eliminarea necunoscutelor x1, x2, . , xk-1, poate fi scris sub forma:
. Se observa ca inainte de eliminarea necunoscutei xk, sistemul echivalent, obtinut dupa eliminarea necunoscutelor x1, x2, . , xk-1, poate fi scris sub forma:
 , k=1, 2, . , n
, k=1, 2, . , n
a carui descriere
analitica este:
 ,
,  , iar elementele matricei
, iar elementele matricei  sunt:
sunt:
 , respectiv, elementele vectorului
, respectiv, elementele vectorului  , se calculeaza cu relatiile:
, se calculeaza cu relatiile:

Pentru k=n, sistemul nou obtinut este:

Se
cunoaste ca o matrice  poate fi scrisa
sub forma uni produs L·U de
doua matrice, unde matricea L
este inferior triunghiulara si U
superior triunghiulara, daca
poate fi scrisa
sub forma uni produs L·U de
doua matrice, unde matricea L
este inferior triunghiulara si U
superior triunghiulara, daca  . Descompunerea este unica daca elementele matricei
L sau U, de pe diagonala principala sunt specificate astfel:
. Descompunerea este unica daca elementele matricei
L sau U, de pe diagonala principala sunt specificate astfel:

Daca
se relizeaza produsul dintre cele doua matrici L si U si se
face identificarea termenilor, se obtin n2 ecuatii neliniare cu n2 necunoscute . Se observa ca :

iar, daca se determina
elementele primei coloane de sub diagonala principala, se obtin
ecuatiile:

Forma
generala a ecuatiilor din care rezulta elementele liniei k, din matricea U, este:

Elementele
coloanei k a matricei L (inferioare diagonalei principale), sunt date de ecuatiile:

MATLAB
foloseste trei metode de baza, pentru factorizarea matricilor:
Factorizarea Cholesky-pentru matrici
simetrice, pozitiv definite
Factorizarea Lower Upper
(LU)-eliminarea Gauss, pentru matrici patratice
Factorizarea ortogonala (QR)-
pentru matrici rectangulare
Toate
aceste metode de factorizare se apeleaza, in MATLAB, utilizand
functiile specifice: chol(), lu(), qr() . Caracteristica, valabila in toate metodele, o constituie
utilizarea matricei triunghiulare ale carei elemente, situate deasupra sau sub
diagonala principala, sunt toate egale cu zero . Toate sistemele de
ecuatii liniare, care permit utilizarea matricilor triunghiulare
(factorizari), se rezolva usor folosind pre- sau post-substitutia .
Factorizarea Cholesky
Factorizarea
Cholesky este o metoda utilizata pentru rezolvarea unui sistem de
ecuatii liniare de forma: Sx=b unde S
este o matrice pozitiv definita
(o matrice este pozitiv definita daca elementele diagonalei
principale sunt toate pozitive, iar celelalte elemente componente ale matricei
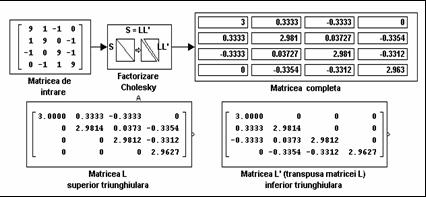
nu sunt "prea mari") . Reprezentarea schematica, a factorizarii
Cholesky, este prezentata in figura alaturata, cu ajutorul
blocurilor de calcul DSP (Digital
Signal Processing), proiectate, special pentru procesarea semnalelor
digitale, pentru a fi folosite in mediile de simulare dinamica in Simulink
(MATLAB 6)
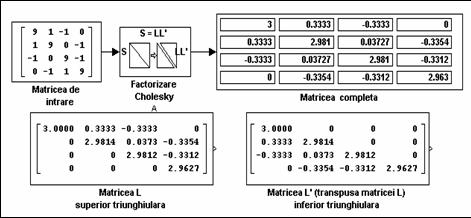
Prin
factorizare Cholesky, o matrice S,
simetrica si pozitiv definita, se exprima ca produsul
dintre o matrice superior triunghiulara, L (elementele superioare diagonalei principale, sunt diferite cu
zero), si transpusa acesteia, L':
S=L'*L
Factorizarea
Cholesky se realizeaza cu functia MATLAB chol(), care se apeleaza cu una din sintaxele :
L=chol(S)
[L, p]=chol(S)
Pentru
exemplificare, se va folosi ca matrice "de intrare", matricea pascal de ordinul 7:
» S=pascal(7)
S =
1 1 1 1 1 1 1
1 2 3 4 5 6 7
1 3 6 10 15 21 28
1 4 10 20 35 56 84
1 5 15 35 70 126 210
1 6 21 56 126 252 462
1 7 28 84 210 462 924
» L=chol(S)
L =
1 1 1 1 1 1 1
0 1 2 3 4 5 6
0 0 1 3 6 10 15
0 0 0 1 4 10 20
0 0 0 0 1 5 15
0 0 0 0 0 1 6
0 0 0 0 0 0 1
Conditiile pentru
factorizarea Cholesky sunt:
i . Matricea S sa fie pozitiv definita
ii . S=
(Lt )* (L) si det(S)>0 (at este notatia pentru matricea
transpusa matricei A);
iii . Exista o matrice unica L, superior triunghiulara, nesingulara, care satisface relatia:S=Lt*L
Un
sistem de ecuatii lineare S·X=B
devine:
Rt·r·x=b
iar solutia acestuia
presupune rezolvarea succesiva a sistemelor:
rty=b si rx=y .
Intrucat, operatorul MATLAB "impartire
la stanga" (backslash) recunoaste ca operanzi matricile triunghiulare, rezolvarea sistemelor de ecuatii lineare se poate realiza folosind:
»X=R(R'B)
Fie sistemul de
ecuatii:

Solutiile acestui sistem, folosind factorizarea Cholesky, se gasesc prin urmatoarea
secventa:
» A=[9, -1, 2;-1, 8, -5;2, -5, 7]; B=[1;-2;-1];
»L=chol(A);
»X=L(L'B)
X =
0 . 1846
-0 . 6308
-0 . 6462
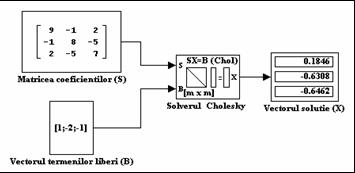
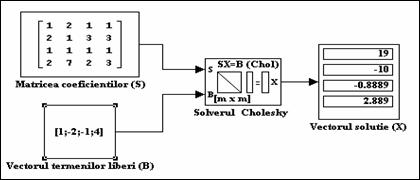
In
Matlab 6 este posibila rezolvarea sistemelor simetrice, prin metoda Cholesky, folosind Solver-ul
Cholesky din pachetul de programe DSP Blockset Simulink . De exemplu, pentru
rezolvarea sistemeului de ecuatii liniare dat prin: , se foloseste urmatorul "model" de rezolvare
(solver):
Ex . : Se cere factorul Cholesky al matricei:

Cu secventa MATLAB:
»A=[9, 1, -1, 0;1, 9, 0, -1;-1, 0, 9, -1;0, -1, 1, 9];
» [r, p]=chol(a)

p=0 (matrice pozitiv definita)
Solutie
data in Matlab 6 folosind pachetul
de programe DSP Blockset din Simulink:
Tema:Sa se rezolve sistemul: prin factorizare Choleski .
prin factorizare Choleski .
Solutia sistemului, data in Matlab 6, folosind pachetul de programe DSP Blockset din Simulink:
Solverul
Cholesky va realiza, in acest caz o rezolvare a sistemului de ecuatii, dar
actvarea "simularii" va avea ca rezultat afisarea in linia de
comanda a MATLAB, a mesajului "Warning:
Input matrix to block 'Model de rezolvare/Solverul Cholesky /Cholesky Factorization' is not
positive definite . " . Acest mesaj avertizeaza utilizatorul asupra
faptului ca matricea de intrare, din fisierul "model" Model de rezolvare, nu este pozitiv
definita . In acest caz solutia data prin Solverul Cholesky este
eronata, intrucat matricea coeficientilor nu este pozitiv
definita . Totusi, radacinile verifica prima
ecuatie, cu eroare la a patra zecimala .
Rezolvarea
sistemului prin determinarea matricei inverse (matricea coeficientilor
fiind nesingulara, iar rangul matricei extinse este egal cu rangul
matricei coeficientilor, asadar sistemul admite solutie
unica), are ca rezultat vectorul solutie: X=[ -5; 2; 6; -4;] . Aceasta solutie
verifica toate ecuatiile sistemului .
Nota:-Daca se incearca determinarea factorului Cholesky, prin functia MATLAB chol([1, 2, 1, 1;2, 1, 3, 3;1, 1, 1, 1;2, 7, 2, 3]),
va fi afisat un mesaj de eroare:
(???
Error using ==> chol
Matrix
must be positive definite . )
intrucat matricea de la
argumentul functiei chol() are
elemente cu "mult diferite" .
Factorizarea lower-upper (lu)
Prin
factorizarea lower-upper lu , o matrice patratica este descompusa sub forma
produsului a doua matrici triunghiulare: una inferior triunghiulara
(lower), permutata (o matrice permutata, dupa o anumita
regula este o matrice in care liniile sunt pivotate intre ele), cu
elementele, de pe diagonala principala, egale cu unitatea (matricea l)
si cealalta, o matrice superior triunghiulara (upper), (matricea
u) .
In MATLAB, factorizarea lu este
utilizata pentru obtinerea inversei unei matrici cu functia inv()
(inversa unei matrici A, se
calculeaza ca produsul dintre inversa matricei inferior triunghiulara
L, calculata prin eliminare
Gauss, si inversa matricei superior triunghiulara U, calculata prin aceeasi
metoda), respectiv pentru calculul determinantului matricelor cu
functia det() (ca produs dintre determinanul matricei inferior
triunghiulara L si determinanul matricei superior
triunghiulara U) . Este, totodata, baza rezolvarii ecuatiilor liniare prin
'impartirea matricelor' obtinuta cu operatorii "
" si " / " .
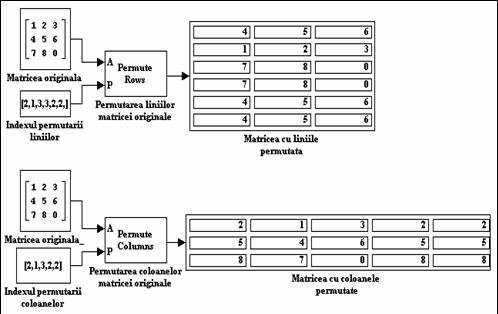
Permutarea liniilor sau coloanelor
unei matrici se poate exemplifica foarte sugestiv printr-o schema cu
blocuri DSP . Presupunem ca se doreste permutarea liniilor unei matrici  dupa
urmatorul index:
P=[2, 1, 3, 3, 2, 2, ], respectiv permutarea coloanelor, dupa urmatoarea
regula:Q=[2, 1, 3, 2, 2] . Atunci, schema bloc este urmatoarea:
dupa
urmatorul index:
P=[2, 1, 3, 3, 2, 2, ], respectiv permutarea coloanelor, dupa urmatoarea
regula:Q=[2, 1, 3, 2, 2] . Atunci, schema bloc este urmatoarea:
Factorizarea lower-upper se
realizeaza dupa urmatoarea schema generalizata:
Factorizarea unei matrici, prin metoda lower-upper, se
realizeaza cu functia lu()
si se apeleaza cu una dintre sintaxele:
[LU]=lu(S) - cu un singur parametru de iesire, matricea [LU]
[l, u]=lu(S) - returneaza o matrice
superior triunghiulara, u,
si o matrice inferior triunghiulara permutata, l,
astfel incat S=l*u
[l, u, p]=lu(x) - returneaza o matrice
superior triunghiulara in u,
inferior triunghiulara in l si permutarea
matriceala in p, astfel incat l*p=p*S
Ex . :
Sa
se factorizeze, prin metoda lower-upper,
matricea
Cu secventa MATLAB
»A=[1, 2, 3;4, 5, 6;7, 8, 0];
»[LU]=lu(A)
LU =
7 . 0000 8 . 0000 0
0 . 1429 0 . 8571 3 . 0000
0 . 5714 0 . 5000 4 . 5000
»[l, u]=lu(A)






unde, matricea L,
este o permutare a matricei inferior triunghiulare, iar u este
o matrice superior triunghiulara .
» [L, U, P]=lu(A)
L =
1 . 0000 0 0
0 . 1429 1 . 0000 0
0 . 5714 0 . 5000 1 . 0000
U =
7 . 0000 8 . 0000 0
0 0 . 8571 3 . 0000
0 0 4 . 5000
P =
0 0 1
1 0 0
0 1 0
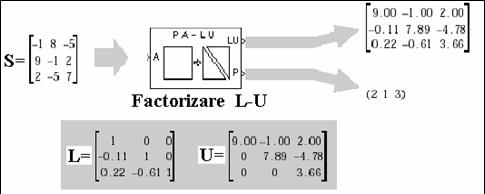
In Matlab, versiunile
superioare versiunii 5 . 3, este posibila factorizarea matricilor
patratice prin metoda lower-upper folosind
pachetul de programe DSP Blockset din Simulink . De exemplu, pentru matricea  , folosind
pachetul DSP Blockset se obtine
matricea compusa din matricea L,
inferior triunghiulara, si matricea superior triunghiulara:
, folosind
pachetul DSP Blockset se obtine
matricea compusa din matricea L,
inferior triunghiulara, si matricea superior triunghiulara:
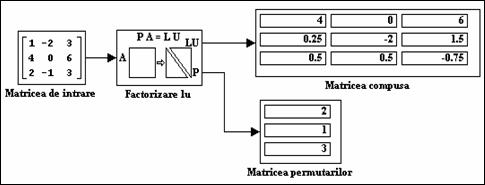
Matricea
Ap, (linia 2 pivotata, astfel incat aceasta
devine linia 1 ) este  , iar matricile triunghiulare L (nepivotata) si
U
, iar matricile triunghiulare L (nepivotata) si
U
sunt: , respectiv
, respectiv 
Pentru a observa modul in care
sunt determinate matricile L si
U, se va apela functia MATLAB lu(A) in toate cele trei variante
posibile:
»
A=[1, -2, 3;4, 0, 6;2, -1, 3];
»
[LU]=lu(A)
LU =
4 . 0000 0 6 . 0000
0 . 2500 -2 . 0000 1 . 5000
0 . 5000 0 . 5000 -0 . 7500
»
[L, U]=lu(A)
L =
0 . 2500 1 . 0000 0
1 . 0000 0 0
0 . 5000 0 . 5000 1 . 0000
U =
4 . 0000 0 6 . 0000
0 -2 . 0000 1 . 5000
0 0 -0 . 7500
»
[L, U, P]=lu(A)
L =
1 . 0000 0 0
0 . 2500 1 . 0000 0
0 . 5000 0 . 5000 1 . 0000
U =
4 . 0000 0 6 . 0000
0 -2 . 0000 1 . 5000
0 0 -0 . 7500
P =
0 1 0
1 0 0
0 0 1
Rezolvarea
sistemelor de ecuatii ax=b prin factorizarea lower upper presupune urmatoarele
etape:
i . determinarea
matricelor L si U cu functia MATLAB »[L, U]=LU(A);
ii . determinarea
vectorilor »Y=lb si »x=uy
Etapa ii . , poate fi
realizata si compact cu
instrutiunea » x=u (lb)
De exemplu, pentru
sistemul de 3 ecuatii si 3 necunoscute  , se foloseste urmatoarea secventa
MATLAB:
, se foloseste urmatoarea secventa
MATLAB:
»A=[1, -2, 3;4, 0, 6;2, -1, 3];B=[1;-2;-1];
»[L, U]=lu(A);X=U(LB)
obtinandu-se solutia
sistemului :
X =
-2
0
1
Daca factorizarea se
realizeaza prin apelarea cu trei parametri de iesire, atunci se
obtin radacinile permutate ale sistemului dat :
»[L, U, P]=lu(C); X=U(LB)
X =
-0 . 5000
1 . 5000
0 . 5000
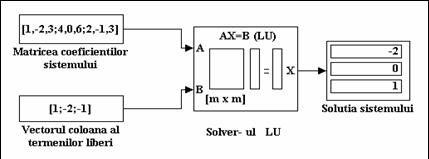
In
Matlab 6 este posibila
rezolvarea sistemelor liniare cu n ecuatii
si n necunoscute prin metoda lower-upper folosind pachetul de programe DSP Blockset din Simulink . De exemplu, pentru rezolvarea
sistemului 3x3 , se foloseste urmatorul model Simulink :
Factorizarea
ortogonala ( q-r )
Prin factorizare q-r, o matrice se exprima ca produsul dintre o matrice ortogonala, q,
si o matrice superior triunghiulara, r .
Matricea ortogonala sau matricea cu coloane ortonormale,
este acea matrice reala care are toate coloanele de lungime unitara, si sunt perpendiculare . Daca o matrice Q este ortogonala, atunci :
Q'*Q=1
Daca matricea este complexa, atunci termenul corespunzator
este matrice unitara . Matricea
ortogonala si matricea unitara sunt usor de utilizat, in
plus, nu introduc si nu amplifica erorile de calcul . Din acest motiv, aceste matrici sunt utilizate in calcule specifice analizei numerice .
Factorizarea q-r, se realizeaza dupa
urmatoarea schema generalizata :
In linia de comanda, factorizarea q-r se apeleaza in
urmatoarele variante :
[Q, R] = qr(A) (matrice complet definita, sau matricea
dispersiilor)
[Q, R] = qr(A, 0) ( matrice complet definita, sau matricea
dispersiilor)
[Q, R, E] = qr(A) (matrice complet definita)
[Q, R, E] = qr(A, 0) (matrice complet definita)
X = qr(A) (matrice complet definita)
R = qr(A) (matricea dispersiilor)
[C, R] = qr(A, B) (matricea dispersiilor)
R = qr(A, 0) (matricea dispersiilor)
[C, R] = qr(A, B, 0) (matricea dispersiilor)
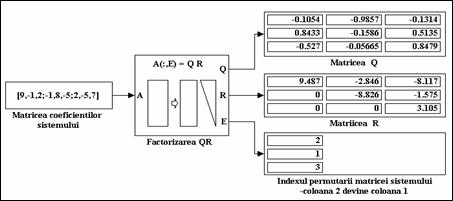
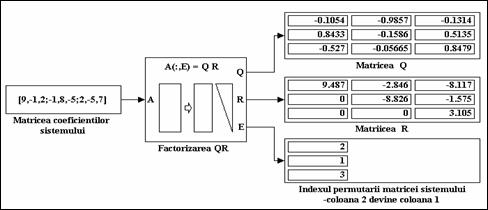
In Matlab 6 este posibila
factorizarea matricelor patratice prin metoda q-r folosind pachetul de programe DSP Blockset din Simulink . De exemplu, pentru matricea  , folosind
pachetul DSP Blockset se obtine:
, folosind
pachetul DSP Blockset se obtine:
Ex . :
Sa se determine descompunerea q-r
a matricei 
Cu secventa MATLAB
»A=[1, 2, 3;4, 5, 6;7, 8, 0];
»
[q, r]=qr(a)
Q =
-0 . 1231 0 . 9045 0 . 4082
-0 . 4924 0 . 3015 -0 . 8165
-0 . 8616 -0 . 3015 0 . 4082
R =
-8 . 1240 -9 . 6011 -3 . 3235
0 0 . 9045 4 . 5227
0 0 -3 . 6742
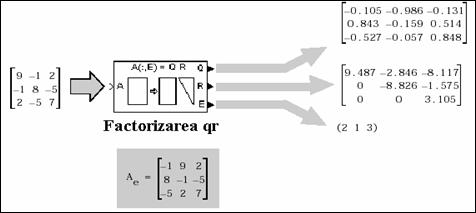
In Matlab, versiunile superioare versiunii
5 . 3, este posibila factorizarea matricilor patratice prin metoda q-r folosind pachetul de programe DSP Blockset din Simulink . De
exemplu, pentru matricea  , folosind
pachetul DSP Blockset, din Simulink, se obtine:
, folosind
pachetul DSP Blockset, din Simulink, se obtine:
Factorizarea 'Q-R' se utilizeaza pentru rezolvarea sistemelor de
ecuatii liniare cu mai multe ecuatii decat necunoscute (sisteme
supra-determinate) . Cea mai buna solutie a unor astfel de sisteme, in
sensul celor mai mici patrate, este calculata cu instructiunea: x=ab,
care utilizeaza aceasta factorizare .
Prin utilizarea factorizarii
QR, solutia x este
calculata in doua etape:
Y=(q-1)*b
x=ry
Aceeasi solutie se obtine folosind urmatoarea
secventa MATLAB, scrisa compact:
»[Q, R]=qr(A); X=R(inv(Q)*B)
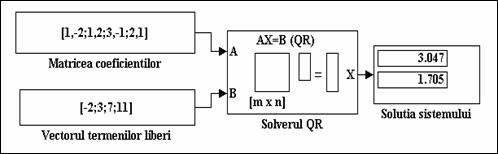
De exemplu, solutia
sistemului liniar  , se obtine, folosind urmatoarea
secventa:
, se obtine, folosind urmatoarea
secventa:
» A=[1, -2;1, 2;3, -1;2, 1]; B=[-2;3;7;11];
[Q, R]=qr(A);
» X=R(inv(Q)*B)
X =
3 . 0470
1 . 7047
Folosind
pachetul DSP Blockset, din Simulink, se obtine:
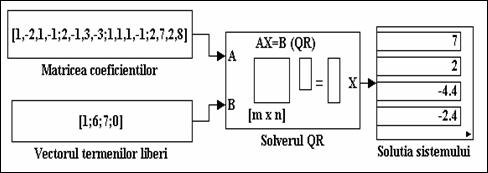
Folosind o
secventa MATLAB, similara, solutia sistemului  se obtine prin
factorizare QR:
se obtine prin
factorizare QR:
» A=[1, -2, 1, -1;2, -1, 3, -3;1, 1, 1, -1;2, 7, 2, 8];
B=[1;6;7;0];
[Q, R]=qr(A);
» X=R(inv(Q)*B)
X =
7 . 0000
2 . 0000
-4 . 4000
-2 . 4000
Vectorul X contine radacinile
sistemului: X=, x=7; y=2; z=-4, 4; t=-2, 4 .
Folosind
pachetul DSP Blockset, din Simulink, se obtine:
Valori si vectori proprii
In general, in aplicatiile
ingineresti exista un interes deosebit pentru determinarea valorilor
proprii reale si complexe ale unei matrici reale . Analiza metodelor de
calcul ale valorilor proprii pentru matricele reale poate fi extinsa la
matricele cu elemente complexe . Asemanator rezolvarii sistemelor
de ecuatii, si in cazul determinarii valorilor si
vectorilor proprii exista doua tipuri de metode: metode directe
si metode indirecte . Folosirea metodelor directe sau indirecte
depinde mai mult de natura solutiei cerute decat de forma matricei .
Exista
aplicatii in care se pot cere n
valori proprii si n
vectori proprii ai unei matrici de ordinul n
si alte aplicatii in care se cere doar un numar k<n de valori si vectori
proprii, precum si aplicatii la care se cere valoarea proprie
maxima (minima) in valoare absoluta . In cazul in care se cere o
valoare proprie, sau un numar redus de valori proprii k<n, se pot aplica metodele indirecte (iterative), iar in
cazul in care se cer toate, sau aproape toate valorile propii, este preferabil
sa se foloseasca metodele directe care implica
transformarile similare ce reduc matricea initiala A
la o matrice similara B de o forma particulara
(reducandu-se astfel algoritmul de calcul propriu-zis) .
Problema valorilor si vectorilor proprii apare intr-o
mare varietate de aplicatii si se scrie sub forma Ax lx sau, in general, Ax lBx vibratiile corpurilor elastice, difuzia masica, sisteme
oscilatorii .
In studiul sistemelor fizice este, adesea, necesara rezolvarea unor
sisteme de ecuatii liniare avand forma algebrica generala :

unde A este o matrice
simetrica reala, x este vectorul variabilelor independente iar  un parametru scalar
denumit valoare caracteristica sau valoare proprie . Problema
rezolvarii sistemului consta in determinarea parametrului si a vectorului x corespunzator, vector cunoscut
sub denumirea de vector caracteristic
sau vector propriu .
un parametru scalar
denumit valoare caracteristica sau valoare proprie . Problema
rezolvarii sistemului consta in determinarea parametrului si a vectorului x corespunzator, vector cunoscut
sub denumirea de vector caracteristic
sau vector propriu .
In determinarea
solutiilor nebanale ale sistemului de ecuatii :Ax=lx, unde :
a -
este matrice patratica de ordinul n,
x -
este vector coloana de ordinul n,
l - este un scalar,
valorile x, respectiv l, care satisfac ecuatia de mai sus se
numesc vectori proprii, respectiv valori proprii .
Pentru
a evidentia semnificatia fizica a valorilor si vectorilor proprii se considera
urmatoarele exemple .
A .
Presupunand necesar studiul
vibratiilor libere ale unui sistem constand din trei corpuri solide de masa, 2m, 4m, 6m, respectiv, fixate pe o bara elastica, la
distanta egala, l,
unul de altul, respectiv de reazemele de incastrare ale barei, acesta conduce
la scrierea ecuatiilor miscarii si la formularea unei
probleme de valori proprii:

unde ω
reprezinta frecventa, x vectorul deplasare si k=s/l
(s- tensiunea in bara, 4l- lungimea barei) . Daca se
realizeaza substitutia  , sistemul de ecuatii ale miscarii, devine:
, sistemul de ecuatii ale miscarii, devine:

B .
Un
sistem fizic format din doua corpuri solide de mase m1, respectiv m2,
legate intre ele prin trei arcuri elastice elicoidale, avand coeficientii
de elasticitate  , este descris
matematic prin sistemul de ecuatii diferentiale ordinare:
, este descris
matematic prin sistemul de ecuatii diferentiale ordinare:

unde  sunt deplasarile
pe orizontala fata de starea de echilibru, iar t este timpul .
sunt deplasarile
pe orizontala fata de starea de echilibru, iar t este timpul .
Pentru
oscilatiile naturale sistemul va oscila la o frecventa
unica  , obtinandu-se
oscilatii sinusoidale de amplitudine y
si unghi de defazaj
, obtinandu-se
oscilatii sinusoidale de amplitudine y
si unghi de defazaj  . In acest caz expresiile celor doua deplasari
sunt:
. In acest caz expresiile celor doua deplasari
sunt:

Daca
se inlocuiesc aceste expresii ale deplasarilor, in sistemul
ecuatiilor de miscare, dupa ordonare, rezulta sistemul

Pentru  si frecventa
adimensionala
si frecventa
adimensionala  , sistemul devine:
, sistemul devine:

Sistemul
omogen, in necunoscutele  , are solutia banala
, are solutia banala  , pentru orice valoare λ,
fapt neinteresant din punct de vedere fizic . Astfel se impune conditia ca
det
, pentru orice valoare λ,
fapt neinteresant din punct de vedere fizic . Astfel se impune conditia ca
det  (A fiind matricea sistemului), rezultand ecuatia
polinomiala in :
(A fiind matricea sistemului), rezultand ecuatia
polinomiala in :

Gradul polinomului caracteristic  reprezinta
numarul gradelor de libertate ale sistemului fizic, precum si
numarul valorilor proprii . Fiecarei valori proprii ii corespunde cel
putin un vector propriu, in cazul de fata existand doi vectori
proprii:
reprezinta
numarul gradelor de libertate ale sistemului fizic, precum si
numarul valorilor proprii . Fiecarei valori proprii ii corespunde cel
putin un vector propriu, in cazul de fata existand doi vectori
proprii:

Din
punct de vedere fizic,  si
si  reprezinta
frecvente naturale in forma adimensionala pentru sistemul considerat:
reprezinta
frecvente naturale in forma adimensionala pentru sistemul considerat:

Daca
se rezolva sistemul omogen in  si
si  pentru
pentru  si in
si in  pentru
pentru  , rezulta vectorii proprii
, rezulta vectorii proprii  si
si  :
:

Se observa ca  este frecventa
cea mai joasa iar
este frecventa
cea mai joasa iar  este frecventa
cea mai inalta pentru sistemul considerat, respectiv, faptul ca la
frecventa
este frecventa
cea mai inalta pentru sistemul considerat, respectiv, faptul ca la
frecventa  cele doua corpuri
se deplaseaza la fel si in aceeasi directie, iar la
frecventa
cele doua corpuri
se deplaseaza la fel si in aceeasi directie, iar la
frecventa  cele doua mase se
deplaseaza cu aceeasi marime dar in sensuri opuse . Cele
doua exemple prezentate au menirea sa evidentieze faptul ca
valorile proprii si vectorii proprii descriu modul de comportare al unui
sistem fizic, reprezentand o serie de marimi ce descriu comportarea
sistemului .
cele doua mase se
deplaseaza cu aceeasi marime dar in sensuri opuse . Cele
doua exemple prezentate au menirea sa evidentieze faptul ca
valorile proprii si vectorii proprii descriu modul de comportare al unui
sistem fizic, reprezentand o serie de marimi ce descriu comportarea
sistemului .
Valorile si vectorii
proprii ai unei matrici patratice se calculeaza, in Matlab, cu functia eig() si se apeleaza cu una
din sitaxele:
v=eig(a)
v=eig(a, b)
[v, d]=eig(a)
[v, d]=eig(a, b)
[v, d]=eig(a, 'nobalance')
Prin apelarea functiei
MATLAB eig(), in aceste variante, se
obtin urmatoarele rezultate
v=eig(a)
returneaza un vector care contine valorile proprii ale matricei a
[v, d]=eig(a) returneaza o matrice v ale carei
coloane sunt vectorii proprii corespunzatori valorilor proprii si, o
matrice diagonala d care contine valorile
proprii ale matricei a astfel incat:
a*v=v*d
[v, d]=eig(a, 'nobalance') returneaza
valorile si vectorii proprii fara a executa in prealabil o
echilibrare (aproximare) . Daca
matricea contine elemente mici, comparabile cu erorile de rotunjire, balansarea se scaleaza, facandu-le la fel de semnificative ca
celelalte elemente ale matricei originale . Acest lucru conduce in final la
vectori proprii incorecti . In astfel de situatii se utilizeaza
notiunea de 'nobalance' .
Daca
matricea are valori proprii de ordinul intai (valorile proprii l sunt
distincte), atunci vectorii proprii sunt independenti . Daca vectorii
proprii nu sunt independenti, atunci matricea originala nu este
neregulata . Chiar daca o matrice este neregulata, solutia
functiei eig() satisface
ecuatia:
A*x=x*d
Valorile si vectorii proprii
generalizati determina solutiile nebanale ale ecuatiei:
Ax=lbx
unde a si b sunt matrici patratice de
ordinul n, iar l este un
scalar . Valorile lui l care satisfac ecuatia se numesc valori
proprii generalizate si valorile X corespunzatoare sunt vectorii proprii generalizati .
Daca b este o matrice nesingulara (det(b) , adica matricea este inversabila), problema calculului valorilor si vectorilor proprii se reduce la o
problema standard cu valori proprii prin inlocuirea lui a
cu b-1a,
intrucat ecuatia este echivalenta cu:
B-1ax=lx
Calculul vectorilor si valorilor proprii generalizate se
realizeaza cu functia MATLAB eig()
si se apeleaza cu una dintre sintaxele:
» v=eig(a, b)
returneaza un vector care contine
valorile proprii generalizate, daca a si b sunt matrici
patratice ;
» [v, d]=eig(a, b)
returneaza
o matrice v ale carei coloane sunt vectorii proprii
corespunzatori si, o matrice diagonala d ce contine
valorile proprii generalizate, astfel incat: A*v=b*v*d
Ex . :
Sa se determine valorile si vectorii proprii ai matricei 
Cu secventa MATLAB :
» A=[-2 1 0; 1 -2 1;
0 1 -2]
» [v, d]=eig(a)
Se obtin rezultatele


Aplicand functia
MATLAB eig(), sistemelor de
ecuatii ale miscarii, pentru cele doua sisteme fizice, tratate teoretic, la inceputul acestui paragraf, se obtin urmatoarele
rezultate :
A . - pentru primul sistem:
A=[2, -1, 0;-1, 2, -1;0, -1, 2]
[V, D]=eig(A)
V =
0 . 5000 -0 . 7071 -0 . 5000
0 . 7071 0 . 0000 0 . 7071
0 . 5000 0 . 7071 -0 . 5000
D =
0 . 5858 0 0
0 2 . 0000 0
0 0 3 . 4142
V=eig(A)
V =
B . -pentru cel de-al doilea
sistem :
A=[2, -1;-1, 2];
[V, D]=eig(A)
V =
D =
V=eig(A)
V =
Calculul valorilor singulare
O valoare singulara corespunzatoare unei matrici
rectangulare este valoarea scalarului  , iar vectorii
singulari corespunzatori aceleiasi matrici sunt vectorii u si v care respecta relatia de
interdependenta :
, iar vectorii
singulari corespunzatori aceleiasi matrici sunt vectorii u si v care respecta relatia de
interdependenta : ,
,  (aici, notatia VT
reprezinta transpusa matricei V)
(aici, notatia VT
reprezinta transpusa matricei V)
Calculul acestor valori
este un mijloc sigur de determinare a rangului unei matrici de forma
generala .
Daca, valorile
singulare , sunt folosite pentru a forma o matrice diagonala  , iar cu elementele vectorilor singulari, corespunzatori, se formeaza matricile ortogonale U si V, se poate
scrie :
, iar cu elementele vectorilor singulari, corespunzatori, se formeaza matricile ortogonale U si V, se poate
scrie :


Daca U si V sunt ortogonale (UT * U =1, VT * V=1), atunci acestea
reprezinta rezultatul descompunerii
in valori singulare a matricei A :

Descompunerea
completa, in valori singulare, a unei matrici de tipul Amxn, are ca rezultat o
matrice Umxm, una  , respectiv o matrice Vnxn
(adica matricile U si V sunt patratice, in timp ce are ordinul matricei A) . Daca matricea A are numarul de linii mai mare
decat numarul de coloane, atunci descompunerea in valori singulare va avea
ca rezultat o matrice U de
dimensiuni mari, dar ultimele »m-n »
coloane sunt inmultite cu zero, in matricea . In aceasta situatie, economia in marimea
descompunerii, are efecte in timpul de calcul si in spatiul de
memorie necesar stocarii rezultatelor, prin renuntarea la calculul
acelor elemente care, oricum sunt eliminate prin inmultirea cu zero, si eliminarea acelor coloane din reprezentarea matricei U . In acest mod, va fi determinata
si afisata o matrice U
cu dimensiunea mxn, o matrice , de ordinul nxn
respectiv, matricea V, de
aceeasi dimensiune . Daca matricea A este patratica, simetrica si pozitiv
definita, atunci descompunerea in valori si vectori proprii este
identica descompunerii in valori singulare . De remarcat ca
rezultatele descompunerii in valori singulare a unei matrici reale sunt
intotdeauna reale, in timp ce, descompunerea in valori si vectori proprii, a unei matrici reale, poate fi complexa .
, respectiv o matrice Vnxn
(adica matricile U si V sunt patratice, in timp ce are ordinul matricei A) . Daca matricea A are numarul de linii mai mare
decat numarul de coloane, atunci descompunerea in valori singulare va avea
ca rezultat o matrice U de
dimensiuni mari, dar ultimele »m-n »
coloane sunt inmultite cu zero, in matricea . In aceasta situatie, economia in marimea
descompunerii, are efecte in timpul de calcul si in spatiul de
memorie necesar stocarii rezultatelor, prin renuntarea la calculul
acelor elemente care, oricum sunt eliminate prin inmultirea cu zero, si eliminarea acelor coloane din reprezentarea matricei U . In acest mod, va fi determinata
si afisata o matrice U
cu dimensiunea mxn, o matrice , de ordinul nxn
respectiv, matricea V, de
aceeasi dimensiune . Daca matricea A este patratica, simetrica si pozitiv
definita, atunci descompunerea in valori si vectori proprii este
identica descompunerii in valori singulare . De remarcat ca
rezultatele descompunerii in valori singulare a unei matrici reale sunt
intotdeauna reale, in timp ce, descompunerea in valori si vectori proprii, a unei matrici reale, poate fi complexa .
Descompunerea in valori singulare a matricei A, se poate face, in MATLAB, folosind functia specifica svd() . Functia svd() se apeleaza cu una din
sintaxele:
D=svd(A) - returneaza un vector care
contine valorile singulare
[u, s, v]=svd(A) - returneaza o matrice
diagonala s cu aceleasi dimensiuni ca A, avand elementele
diagonale nenegative (care sunt si valori singulare) in ordine
descrescatoare si matricele u si v care satisfac
relatia: X=u*s*v
[u, s, v]=svd(x, 0) - efectueaza un calcul
mai rapid al valorilor singulare,
Ex . :
Sa se descompuna, in valori singulare, matricea 
Rezolvare : Cu secventa MATLAB
» A=[1 5; 4 3];
» D=svd(a)
 D
=
D
=
6 . 6713
2 . 5482
» [u, s, v]=svd(a)
U =
-0 . 7163 -0 . 6977
-0 . 6977 0 . 7163
 S
=
S
=
6 . 6713 0
0 2 . 5482
V =
-0 . 5257 0 . 8507
-0 . 8507 -0 . 5257
Ex . :Sa
se descompuna in valori singulare, matricea  , folosind toate variantele de apelare a functiei MATLAB
svd() .
, folosind toate variantele de apelare a functiei MATLAB
svd() .
Rezolvarea este
imediata, cu urmatoarele secvente:
» A=[1, 7;5, 3;8, 1;4, 9];
» D=svd(A)
D =
» [U, S, V]=svd(A)
U =
S =
V =
» [U, S, V]=svd(A, 0)
U =
S =
V =
APLICATII
Fie: a= ; b=
; b= ; c=2 .
; c=2 .
Sa se calculeze:a+b; a-b;a+c .
Fie: m= ; n=
; n=
Sa se calculeze: M=m+n
Fie: a= ;b=
;b= ; c=2 .
; c=2 .
Sa se calculeze produsele : ab; ba; ac; bc .
Fie: a= b=
b=
Sa se calculeze:a/b; b/a .
Fie: a= ; c=
; c=
Sa se calculeze catul : d=a/b .
Fie: a= ; b=
; b=
Sa se calculeze:ab; ba .
Fie: a= b=3;c= - 3
b=3;c= - 3
Sa se calculeze:a^b; b^a; a^c
: Calculati determinantii urmatoarelor matrici:


 .
.
Calculati inversa matricei: A =

Sa se determine rangul matricei
A = 
Sa
se descompuna, prin factorizare Choleski,
Lower-Upper, respectiv, QR, matricile:


Sa
se rezolve, folosind metodele de factorizare Choleski, Lower-Upper,
respectiv, QR, urmatoarele
sisteme de ecuatii lineare:
 ;
; 
Sa
se rezolve, folosind metodele de factorizare Choleski, Lower-Upper,
respectiv, QR, urmatoarele
sisteme de ecuatii lineare:

Sa
se gaseasca valorile si vectorii proprii ai matricelor



