INGINERIE CALCULATOARE
PROIECTAREA SI
REALIZAREAUNUI CEAS DIGITAL - PARTEA SOFTWARE
Introducere -
prezentarea proiectului, oportunitate, structura proiectului
Din cele mai vechi timpuri ceasurile
au avut menirea de a cuantiza trecerea timpului si au ajuns obiecte
indispensabile omului modern. La inceput ceasurile se bazau pe pozitia relativa
a soarelui in jurul pamantului apoi, datorita evolutiei tehnologice, au aparut
ceasurile mecanice, cu pendul si apoi cu arc, ce ocupa si in prezent o parte
importanta a pietei.
In
momentul aparitiei ceasurilor digitale, acestea pareau ne-fiabile si destul de
robuste, depinzand de o sursa de alimentare externa. In timp insa impreuna cu
dezvoltarea ledurilor si a afisajelor cu cristale lichide, ceasurile digitale
au evoluat exponential.
In
prezent ceasurile digitale au depasit limita "orei exacte", avand
posibilitatea de a transmite si alte informatii utile. In functie de nevoile
utilizatorului, aceste informatii pot fi de tipul : afisarea de
temperatura, tensiune arteriala, text cu scop informativ respectiv alarmarea
sau audierea emisiunilor radio favorite.
Actualmente se intensifica si utilizarea afisajelor cu
leduri in publicitate, deoarece acestea au un impact mare asupra publicului,
datorita intensitatii, culorilor si a posibilitatilor de afisare a informatiei
si imaginilor. Spre deosebire de ceasurile analogice, cele digitale sunt foarte
usor de intretinut, ne-avand componente mecanice in miscare.
Se va realiza un ceas digital ce va implementa
urmatoarele posibilitati de afisare :
- afisare dinamica,
pentru reducerea consumului
- afisaj matricial,
pentru reprezentarea de cifre si litere
- afisare
secventiala, pentru afisarea orei exacte, temperaturii si a mesajelor text
cu acelasi montaj
Dispozitivul este bazat pe microcontrolerul
PIC16F877A produs de firma Microchip. Acesta achizitioneaza temperatura cu
ajutorul senzorului de temperatura TC1047A, produs de aceeasi firma, informatia
temporala de la circuitul specializat DS12887 produs de firma Dallas si comanda
o matrice de afisare, formata din 7x30 Leduri.
Poate avea o mare oportunitate comerciala, putand fi transformat in ceas
stradal cu afisare secventiala de ora exacta, temperatura si slogan publicitar
la un cost redus si impact considerabil pentru public. De asemenea, bazat pe
acest proiect, se poate dezvolta versiunea grafica, ce ar avea si posibilitatea
afisarii imaginilor color cu scop publicitar sau delectativ.
Capitolul 2 trateaza functiile ce trebuie indeplinite de
catre un ceas digital cu afisare secventiala de temperatura, timp si mesaje sub
forma de text. Tot aici se vor explica si principiile ce au stat la baza
dezvoltarii afisajelor matriciale dinamice. De asemenea sunt avute in vedere
prezentarea schemelor bloc si descrierea amanuntita a blocurilor componente.
In capitolu 3, se va descrie microcontrolerul PIC16F877A.
De asemenea se va descrie si tehnica programarii microcontrolerului cu ajutorul
programatorului JDM si a programului IC-Prog .
Urmatoarul
capitol este dedicat descrierii
programului ce ruleaza pe acesta. Ultimul capitol contine concluziile acestui
proiect si cateva idei referitoare la posibilitatile de dezvoltare a ceasurilor
digitale si afisajelor matriciale.
Structura si functiile indeplinite
Principala functie pe care trebuie
sa o indeplineasca un ceas digital este acela de a afisa ora exacta in ore si
minute. Deoarece in ultima perioada clientul doreste o diversificare a informatiei afisate, a aparut
si nevoia ceasurilor digitale care in afara orei exacte, sa afiseze si alte
date ca de exemplu : ziua, luna, anul, temperatura, un mesaj publicitar, etc.
Principalele
functii realizate de sistem sunt urmatoarele :
Afisare temperatura
Afisare timp: ora si minute
Afisare data: ziua si luna
Afisare text -
Text static - de exemplu numele firmei
- Text dinamic, ce se deplaseaza de la stanga la dreapta - de exemplu
sloganul unei campanii publicitare
Functionarea
blocului de afisare este descrisa in amanunt in Capitolul 4.2.
Temperatura este masurata cu ajutorul senzorului TC1047A.
Acesta este un senzor de temperatura cu iesire in tensiune liniar variabila cu
temperatura.TC1047A poate masura intr-o gama de temperatura cuprinsa intre
-40°C si +125°C cu o cuanta de 10mV/°C. Tensiunea de iesire a senzorului va fi
convertita de CAN-ul microcontrolerului PIC16F877A si prelucrata, pentru ca in
final sa poata fi afisata.
Ora exacta va fi
preluata de la modulul RTC (Real Time Clock), implementat cu ajutorul
circuitului DS12887. Acest circuit calculeaza si reda ora si data
calendaristica exacta, pe baza unui ceas quartz-pilotat, si are un acumulator
incorporat. Acest subsistem inlocuieste un numar de 16 componente discrete
intr-o aplicatie normala.
La nivelul microcontrolerului se vor calcula valorile
binare necesare pentru afisarea orei si minutelor, dupa care acestea vor fi
afisate, secvential cu temperatura, data si textul publicitar. Setarea datei si
a orei exacte se face prin intermediul meniului si a butoanelor dedicate.
2.1. Schema bloc
Schema bloc principala contine principalele
elemente ale ceasului digital, impreuna cu descrierea legaturilor dintre
acestea.
Figura 2.1. Schema bloc principala
2.2. Structura blocului de comanda si
control
Schema blocului de comanda contine subsistemele:
blocul de a temperaturii, realizeaza conversie
analog-numerica
blocul de achizitie a timpului, furnizeaza datele
necesare afisarii datei si orei exacte
interfata setare timp, interfata cu utilizatorul,
permite setarea orei, datei si anului, prin intermediul a doua butoane
memoriile de date si program furnizeaza bibliotecile de
date a caracterelor de afisat si spatiu necesar programului
blocul de iesire afisaj realizeaza compatibilitatea
logica intre sistemul de comanda si blocul de afisare
Cablajele si schema de
implementare se gasesc in anexa.
Figura
2.2. Schema bloc comanda
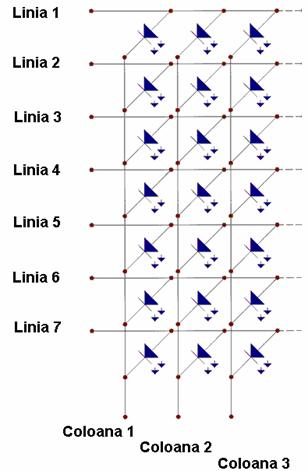
2.3. Structura blocului de control al
afisajului
Acesta contine:
blocul de interfata
blocul de control al linilor si coloanelor, ce
realizeaza logica necesara afisarii datelor pe matricea de leduri
comanda de putere a liniilor, contine circuitele de
putere ce activeaza cele 7 linii ale matricei de leduri
comanda de putere a coloanelor, contine circuitele de
putere necesare celor 30 de coloane ale matricei de leduri
matricea de leduri contine 210, leduri grupate in 6
module a cate 35 de leduri
alimentarea afisajului
Cablajele si schema de
implementare se gasesc in anexa.
2.4. Solutii de implementare si
motivarea lor
Implementarea proiectului se poate realiza cu orice
microcontroler sau procesor ce are posibilitatea de conversie analog-numerica
si respectiv un numar mare de linii de iesire.
Tinand cont de necesitatea unei memorii program si date,
a unui convertor CAN si un sistem de contorizare a orei exacte, am ales
utilizarea urmatoarelor circuitelor
specializate:
- TC1047A
pentru senzor de temperatura
PIC16F877A pentru CAN si Porturi iesire
DS12887 pentru RTC
Blocul
de comanda este bazat pe microcontrolerul PIC16F877A produs de firma Microchip.
Acesta are avantajul unui numar mare de linii de iesire, memorie program si
date incorporata, convertor analog-numeric pe 10 biti incorporat. De asemenea
memoria program poate fi usor incarcata cu un programator JDM prin standardul
ICSP (In Circuit Serial Programing). Memoria program este de tip FLASH, ceea ce
face posibila stergerea si inlocuirea rapida a programului. Descrierea microcontrolerului
PIC16F877A este detailata in Capitolele 4 si 5.2.
Blocul
de Achizitie al temperaturii este compus din senzorul de temperatura TC1047A si
convertorul analog-numeric pe 10 biti al microcontrolerului. Acest bloc
realizeaza conversia temperaturii in informatie afisabila.
Interfata
de programare consta intr-o consola cu doua butoane de la care utilizatorul
poate seta ora exacta, in orice moment al rularii aplicatiei. Primul buton
serveste la selectarea meniului, care poate fi: setare minute, setare ore,
setare zi, luna sau an, iar al doilea buton este folosit la modificarea
valorilor acestor Setari prin incrementarea valorii respective.
Am ales o
afisare matriceala pentru a avea posibilitatea reprezentarii atat a numerelor
corespunzatoare informatiei de timp si temperatura cat si a caracterelor ASCII necesare afisarii textului.
Pentru
blocul de afisare se pot folosi atat leduri discrete cat si matricei de leduri,
de 7x5 leduri, special realizate pentru astfel de aplicatii Acestea din urma
sunt mult mai usor integrabile, avand deja interconectate liniile si coloanele
in aceeasi capsula cu ledurile. In acest proiect s-au utilizat 6 astfel de
module, fiecare a cate 35 de leduri.
In proiect
s-a utilizat matricea de leduri TA07-11GWA, produsa de firma Kingbright.
Figura 2.3.1.
Afisaje leduri

Figura 2.3.2.
Matricea TA07-11GWA
Blocul de
comanda a liniilor este unul foarte simplu, bazat doar pe tranzistoare BC ce
amplifica impulsurile de comanda primite de la microcontroler. In acest bloc se
realizeaza si limitarea in curent a diodelor, prin inserierea in colector a
unei rezistente.
Pentru
implementare s-au utilizat 7 tranzistoare NPN din seria BC - BC337.
Blocul de
comanda al coloanelor este ceva mai complex, deoarece acesta va trebui sa puna
in conductie 7 leduri, in loc de un led in cazul anterior. Din aceasta cauza am
utilizat drivere de putere din familia ULN. Aceste drivere au intrari
compatibile TTL si CMOS 5V, fiind posibila comanda directa de la blocul de
comanda.
In momentul
proiectarii a aparut problema lipsei de linii de comanda la nivelul
microcontrolerului. In cazul legarii directe a afisajului de procesor, as fi
avut nevoie de : 7 iesiri pentru linii si 30 iesiri pentru coloane. Stiind
ca doar o coloana va fi activata la un moment dat, se pot substitui cele 30 de
iesiri cu registri de deplasare conectati in serie. Aceasta metoda reduce
numarul de iesiri la doar 4, indiferent de numarul coloanelor. La inceputul
baleierii afisajului se incarca un singur registru cu valoarea 1 logic dupa
care se aplica un numar de impulsuri de tact, echivalente cu numarul de
coloane. Numarul de coloane se poate contoriza atat prin programare cat si prin
urmarirea valorii ultimului bistabil din sirul de registre. Iesirile
registrelor sunt direct legate la driver-ele de putere. In acest bloc nu exista
limitatoare de curent.
Pentru
implementarea registrelor de deplasare am utilizat registrele cu intrare
seriala si iesire paralela - 74HC164, iar pentru driver-e integratul monolitic
cu 8 tranzistoare Dalington cu emitor comun - ULN2803.
Schema
electrica si cablajul blocului de afisare se gasesc in anexa.
Interfata
dintre blocul de control al afisajului si blocul de comanda, este necesara in
cazul in care se doreste conectarea la distanta a afisajului de catre
electronica de comanda deoarece registrele de deplasare nu au porti cu
histereza pentru eliminarea perturbatiilor.
Pentru
implementare se utilizeaza porti cu Trigger-Smith, implementate in serie cu
cele 3 intrari ale registrelor de deplasare. Circuitul potrivit pentru acest
scop este - 74HC14 sau orice alt buffer cu histereza compatibil CMOS 5V.
Blocul de
ora exacta este format dintr-un singur circuit specializat. Circuitul integrat
DS12887, initial dezvoltat pentru a fi interconectat in sisteme cu magistrala
Intel sau Motorola, se poate utiliza si in aplicatii diverse cum este si acest
proiect. Un mare avantaj al folosirii acestui circuit este ca se economisesc un
numar mare de componente discrete ce ar trebui incluse in montaj pentru realizarea
unui temporizator de precizie.

Figura 2.3.3. DS12887, DS1287
DS12887 are incapsulat un quartz de 32768Hz,
circuite de compensare a variatiilor de temperatura si un acumulator. Acesta
din urma asigura o fiabilitate crescuta a ceasului, deoarece in cazul
intreruperii tensiunii de alimentare, ora exacta se va mentine, afisandu-se in
momentul revenirii tensiunii de alimentare.
Comunicarea
cu circuitul RTC (Real Time Clock) se realizeaza pe o magistrala paralela de 8
biti si 5 linii de control CS (Circuit Select), AS (Address Strobe), DS
(Data Strobe), R/W (Read/Write) si RESET. Exista si posibilitatea utilizarii
unei linii de intrerupere IRQ ce se utilizeaza pentru realizarea unei
intreruperi periodice presetabile. Nu este utilizata in acest proiect.
Structura interna si functionarea acestui circuit sunt descrise in amanunt in
Capitolul 5.2.
Blocul de
alimentare este astfel proiectat incat sa asigure o tensiune de alimentare
continua de 5V pentru electronica de comanda si cea de alimentare a afisajului.
De asemenea s-a incercat simplificarea cat mai mare a acestui bloc. Se
utilizeaza o sursa simpla cu transformator, punte redresoare, capacitate
filtraj si regulator serie. Deoarece afisajul consuma maxim 350 mA, in situatia
in care toate ledurile sunt aprinse, regulatorul a fost ales din seria L78XX.
3. Microcontrolerul PIC16F877A
Circuitul integrat PIC16F877A face parte din generatia de
procesoare 16FXXX, fiind un microcontroler RISC produs de firma "Microchip".
Dupa intrarea pe piata, Microchip a inceputo vasta campanie publicitara prin acordarea
circuitelor mostra utilizatorilor interesati de componente electronice de
ultima ora. Deoarece raportul cost / performanta a acestor produse este unul
foarte bun comparativ cu vechii producatori, microcontrolerele PIC au dobandit
in prezent un mare segment al pietei.
PIC16F877A are urmatoarele caracteristici :
un nucleu pe 8 biti
memorie program incorporata de 8K octeti, memorie de tip
FLASH
memorie date de 368 Bytes SRAM
memorie suplimentara date de 256 Bytes EEPROM
contine un CAN pe 10 biti cu 8 canale de intrare
multiplexate
doua iesiri PWM
doua comparatoare de tensiune
32 de instructiuni
Din punct de vedere al posibilitatilor de
comunicare cu alte periferice si circuite are implementat standardele de
comunicare :
SPI
I2C
USART
Port paralel cu linii de control RD,WR si CS
PIC16F877A are 33 de ce pot fii programate ca
linii intrare, analogica sau digitala, sau iesire digitala.
Procesorul
PIC16F877A are o structura interna conform arhitecturii Harvard, cu magistrale
separate pentru accesul la memoriile interne de program si, respectiv, de date.
Din aceasta cauza el dispune de o mare flexibilitate a aplicatiilor, putand
transfera informatie din memoria program in cea de date. De asemenea este un
procesor rapid, avand divizorul intern doar 4, si poate functiona pana la o
frecventa de 20MHz, rezultand un timp de 0,2us/ciclu masina.
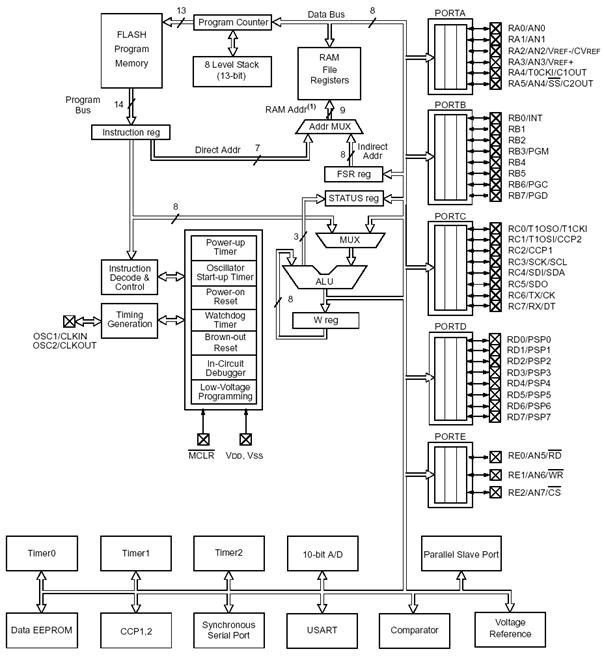 Structura interna a procesorului este
prezentata in figura de mai jos:
Structura interna a procesorului este
prezentata in figura de mai jos:
Figura 3.1. Structura bloc a PIC16F877
Microcontrolerul PIC16F87XA are un contor de program de 13 biti, ce poate adresa o
memorie program de 8K cuvinte a cate 14 biti. Memoria program, de 8K este de
tip FLASH.
Adresa de reset a memoriei program este 00h iar cea de intrerupere 04h.
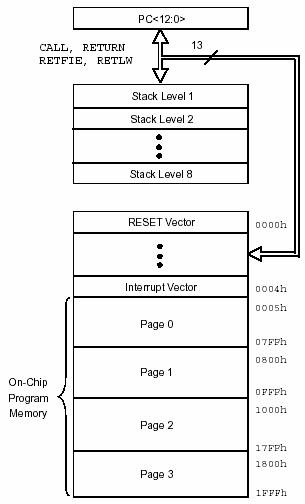
Figura 3.1.1. Organizarea memoriei program
PIC16F877
3.2. Organizarea memoriei de date
Memoria
de date este partitionata in mai multe bancuri de memorie, continand registre
de uz general. Cu ajutorul bitilor RP1, din registru STATUS bit 6, si RP0,
STATUS bit 6, se selecteaza bancul curent.
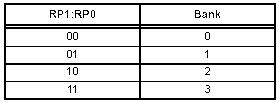
Figura 3.2.1. Setarea bancurilor
Fiecare
banc cuprinde 128 bytes. Locatiile de memorie din zona inferioara bancurilor
este rezervata registrilor cu functii speciale.
3.3. Modulul convertorului
analog-numeric
Convertorul analog numeric are 8 canale de intrare multiplexate.
Conversia semnalului analogic este executata de un convertor pe 10 biti.
Convertorul are intrarile tensiunilor de referinta, Vref+ si Vref-, setabile
soft (fiind combinatii intre tensiunile de alimentare Vdd, Vss si tensiunile de
pe pinii RA2 si RA3).
CAN-ul este astfel proiectat
incat sa poata functiona si in modul SLEEP, mod in care majoritatea functiilor
microcontrolerului sunt inhibate. Pentru a functiona in modul SLEEP, tactul
CAN-lui trebuie adus de la oscilatorul RC intern.
Acest
modul are 4 registri principali:
- ADRESH - partea superioara a rezultatului conversiei
- ADRESL - partea inferioara a rezultatului conversiei
- ADCON0 - primul registru control
- ADCON1 - al doilea registru control
Cu ajutorul ultimilor doi registri se
configureaza functionarea convertorului.
Registrul ADCON0:
ADCS1, ADCS0 : impreuna cu bitul
ADCS2 din ADCON1, seteaza frecventa tactului al modulului de conversie.
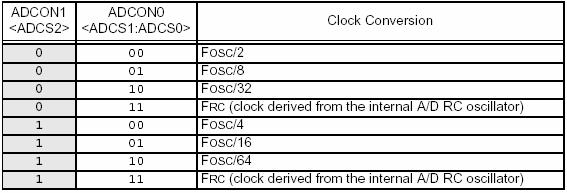
Figura 3.3.1. Setare tact CAN
CHS2, CHS1, CHS0 : biti de selectare a canalului de intrare
000 =
Canal 0 (AN0)
001 =
Canal 1 (AN1)
010 =
Canal 2 (AN2)
011 =
Canal 3 (AN3)
100 =
Canal 4 (AN4)
101 =
Canal 5 (AN5)
110 = Canal
6 (AN6)
111 =
Canal 7 (AN7)
Figura 3.3.2. Setare canal CAN
GO/DONE :bitul de stare a
conversiei. Daca bitul ADON = 1 atunci daca GO/DONE = 1 conversia analog-numerica este in
desfasurare, GO/DONE = 0 conversia
sa terminat.
ADON : bit de control al alimentarii
modulului CAN.
Registrul ADCON0:
ADFM : seteaza formatul
rezultatului conversiei. Daca este 1 registrul ADRSH va contine doar ultimi doi
cel mai semnificativi biti ai conversiei. Daca este 0 atunci registrul ADRESL
va contine pe locatiile superioare ultimi doi cei mai nesemnificativi biti.
ADCS2 : seteaza frecventa tactului al modulului de conversie.
PCFG3, PCFG2, PCFG1, PCGF0 : cei 4 biti seteaza numarul canalelor
analogice de intrare si sursa tensiunilor de referinta Vref+ si Vref-
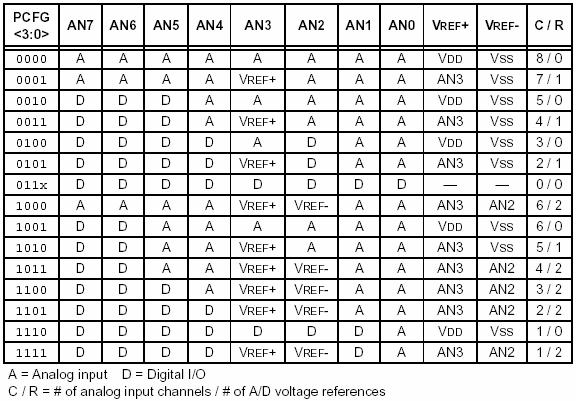
Figura 3.3.2. Configurare
porturi CAN
Canalul
analogic de intrare respectiv tensiunile de referinta, se vor conecta la pinii
exterior asemanator figurii urmatoare.
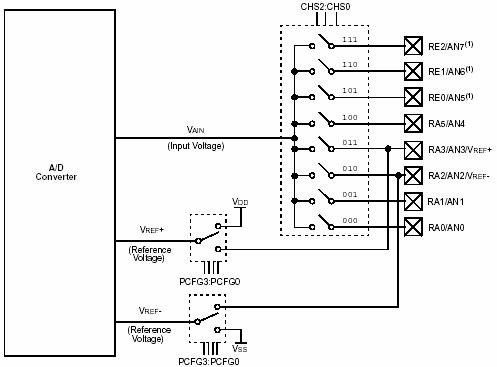
Figura 3.2.1. Structura
selectorului de canal
3.4. Modulul comparator de
tensiune
Modulul
comparator contine doua comparatoare analogice. Intrarile comparatoarelor sunt
multiplexate cu porturile I/O, pini RA0 la RA3, iar iesirile cu pinii RA4 si
RA5. De asemenea sursa de referinta interna, poate fi setata ca intrare a
comparatoarelor.
Registrul CMCON
controleaza multiplexarea intrarilor si iesirile.
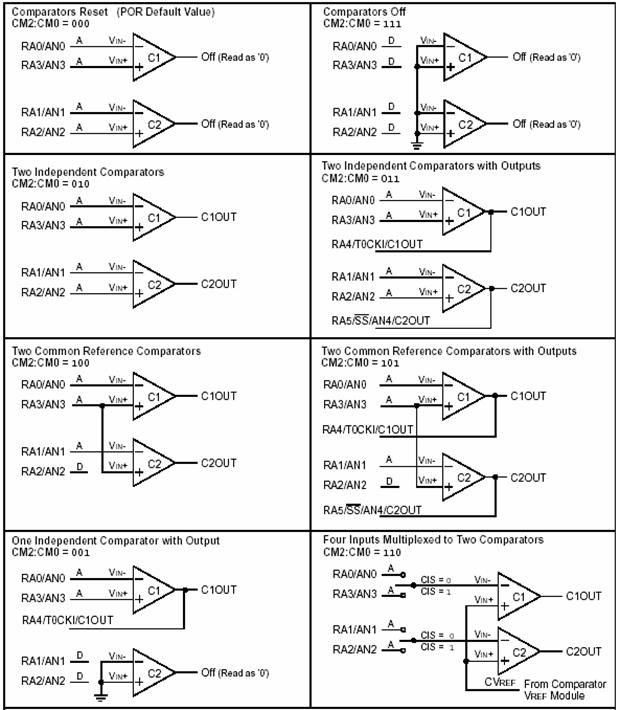
Figura 3.4.1. Comparatoare -
Moduri de functionare
Registrul CMCON:
C2OUT : setare pentru iesirea comparatorului 2, cand
C2INV = 0, iesirea comparatorului trece pe 1 logic in momentul C2 Vin+ > C2
Vin-, C2INV = 1, iesirea trece pe 1 cand C2 Vin+ < C2 Vin-.
C1OUT : setare pentru
iesirea comparatorului 1, cand C1INV = 0, iesirea comparatorului trece pe 1
logic in momentul C1 Vin+ > C1 Vin-, C1INV = 1, iesirea trece pe 1 cand C1
Vin+ < C1 Vin-.
C2INV : setare pentru
inversarea logica a iesirii comparatorului 2, daca este 1 logic atunci iesirea
este negata
C1INV : setare pentru
inversarea logica a iesirii comparatorului 1, daca este 1 logic atunci iesirea
este negata
CIS, CM2, CM1, CM0 : determina modul de
conectare a comparatoarelor cu pinii microcontrolerului, conform figurii 4.3.3.
Iesirile
comparatoarelor pot fi conectate la
logica intreruperilor, ce face posibila sesizarea modificari rezultatelor de
iesire a comparatoarelor. Aceasta se realizeaza prin registri INTCON, PIR2 si
PIE2.
3.5. Modulul tensiune de
referinta interna
Modulul
tensiune de referinta interna este format dintr-o retea de 16 rezistente ce pot
fi activate cu ajutorul registrului CVRCON.
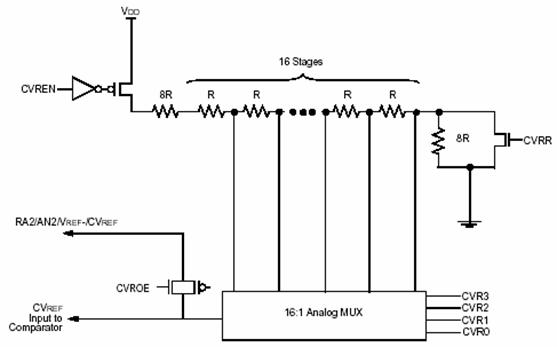
Figura 3.5.1. Blocul referinta de
tensiune
Registrul CVRCON:
CVREN : bit de validare al
modulului de tensiune de referinta intern. Daca este setat pe 1 logic acest
bloc va primi alimentat.
CVROE : valideaza iesirea
acestui modul pe pinul RA2 al microcontrolerului in momentul in care este setat
pe 1 logic.
CVRR : setarea domeniului
generatorului de tensiune de referinta. Daca este pe 1 logic domeniul va fi
cuprins intre 0 si 0,75Vdd, iar in caz contrar, intre 0,25 si 0,75Vdd.
CVR3, CVR2, CVR1, CVR0 : selecteaza in 16 trepte
divizorul de tensiune al sursei de referinta, conform figurii 4.5.1. sau prin
aplicarea formulelor :
CVRR = 1 : CVREF = (VR<3:0>/ 24) *(CVRSRC)
CVRR = 0 : CVREF = 1/4 *(CVRSRC) + (VR3:VR0/ 32) *(CVRSRC)
3.6. Modulul PWM
Modulul PWM poate genera un semnal
PWM cu o rezolutie de 10 biti, iesirea fiind numita CCP1. Modulul este
construit in jurul numaratorului TMR2 de 10 biti, 8 biti si 2 biti ai
prescalarului.
Cu acest modul se poate
utiliza la implementarea surselor in comutatie sau comanda motoarelor in
montajele de variatie a turatiei.
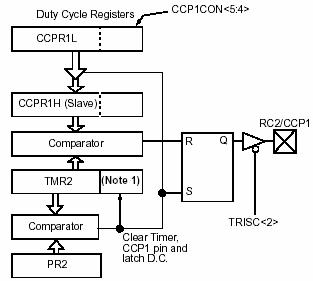
Figura 3.6.1. Blocul PWM
Perioada semnalului PWM se poate
calcula cu formula :
PWM period = [(PR2) +
1] *4 * TOSC
*(valoarea
prescalarului TMR2)
Factorul de umplere al semnalului
PWM se poate calcula cu formula :
FU_PWM
=(CCPR1L:CCP1CON<5:4>) *TOSC * (valoarea prescalarului TMR2)
Rezolutia semnalului PWM
pentru o frecventa stabilita se calculeaza cu formula :
3.7. Modulele
temporizatoare
3.7.1. Modulul Timer0 / WDT
Modulul Timer0 are urmatoarele proprietati :
- Numarator pe 8
biti
- Citibil si
inscriptibil
- Prescalar pe 8
biti
- Posibilitatea
selectiei tactului intern sau extern
- Cerere de
intrerupere la depasire a valorii FFh si 00h
- Selectarea
frontului activ pentru tact extern
Tactul intern este echivalent cu Fosc/4.
Tactul extern se introduce prin intermediul pinului RC4 si nu este divizat
intern.
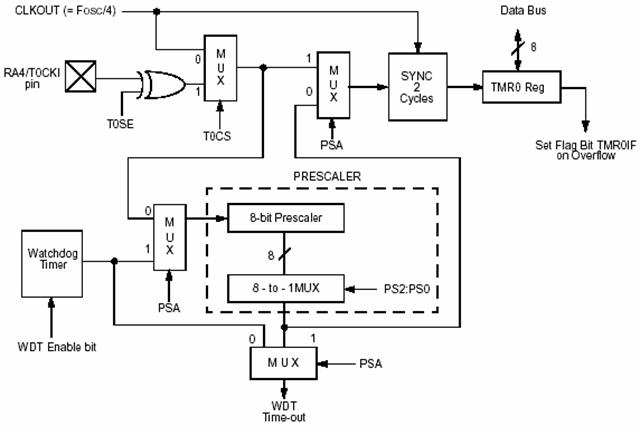
Figura 3.7.1.1. Blocul Timer0/WDT
Prescalarul
si numaratorul sunt impartite si cu modulul WDT, ce realizeaza resetarea
microcontrolerului in cazul unei erori de program. Acesta activeaza
intreruperea WDT-time out.
3.7.2. Modulul Timer1
Modulul Timer1
difera de Timer0, fiind format in jurul unui numarator pe 16 biti, realizat
prin concatenarea a doua numaratoare pe 8 biti.

Figura 3.7.2.1. Blocul Timer1
De
asemenea acesta poate fi folosit ca numarator a tactului extern, care se poate
aduce de la un al doilea oscilator prin intermediul pinilor RC0 si RC1.
Aceasta
metoda se poate utiliza ca o a doua varianta pentru achizitia timpului,
montandu-se un quartz de 32678Hz, si divizand cu prescalarul pe doi biti
T1CKPS1 si T1CKPS0.
3.7.3. Modulul Timer2
Acest
modul se foloseste un numarator pe 8 biti, un prescalar pe 2 biti si un
postscalar pe 4 biti.
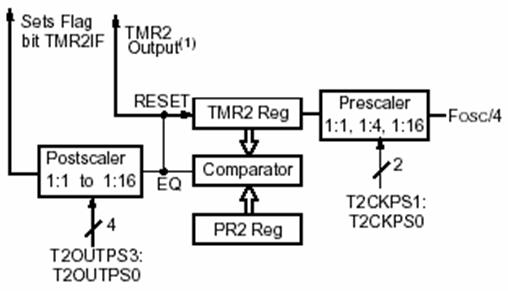
Figura 3.7.3.1. Blocul Timer2
TIMER2 se foloseste si in cadrul
modulatorului PWM. Cele doua moduri nu pot functiona in acelasi timp.
Functionarea in mod de numarator este stabilita de bitul TMR2ON al registrului
T2CON.
3.8. Logica
intreruperi
Familia de microcontrolere
PIC16F87XA are 15 surse de intrerupere. In registrul INTCON se retin fanioanele
individuale ale intreruperilor.
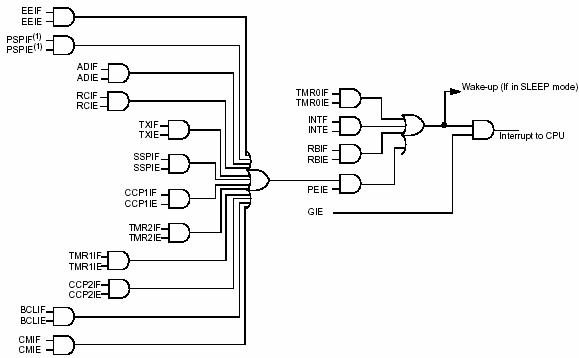
Figura 3.8.1. Blocul intreruperi
Intre sursele de intrerupere se
numara atat intreruperile interne ale numaratoarelor, descrise in alineatele
anterioare, cat si intreruperile externe ale portului B.
Intreruperea RB0/INT poate fi setata
activa pe frontul crescator sau descrescator al semnalului de intrare, avand la
intrare o poarta Trigger Smitt si posibilitatea activarii unui pull up intern
de 10K.
Pinii RB4, RB5, RB6, RB7 pot activa
intreruperea RBIF in momentul schimbarii valori logice la intrarea acestora.
Intreruperea se activeaza atat in momentul trecerii de pe 0 pe 1 logic a
intrarii cat si de pe 1 pe 0, fiind foarte utila pentru conectarea a 4 taste
distincte sau a unei matricei de taste.
4. Programarea microcontrolerului PIC16F877A
4.1. Descrierea programatorului
universal ICSP
Programatorul utilizat se bazeaza pe structura JDM.
Acest tip de programator este unul foarte simplu de realizat, avand putine
piese si conectandu-se la portul serial al calculatorului. De asemenea acesta
nu are nevoie de o sursa anexa de alimentare in timpul programarii, tensiunile
necesare obtinandu-se de la portul serial.
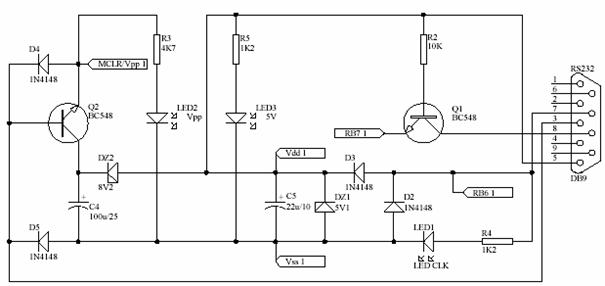
Figura 4.1. Programatorul JDM
Acest tip de programator
poate programa un numar foarte mare de microcontrolere, memorii si circuite
specializate, folosindu-se de standardul serial de programare ICSP (In Circuit
Serial Programing). Acest tip de programare are marele avantaj ca poate fi
utilizat si in montajele in care procesorul este deja inclus, programarea
facandu-se in circuit.
Programarea ICSP se
realizeaza, din punct de vedere hardware, cu ajutorul a trei linii de comanda:
SDA (Serial Data), SCL (Serial Clock) si Vpp (tensiunea de programare in jurul a
14V). Pentru verificarea datelor inscrise in microcontroler se utilizeaza o
tensiune de alimentare de 5V.
Programatorul este realizat pe
montaj, astfel incat utilizatorul sa poata rula aplicatia inscris pe
microcontroler direct de pe acelasi montaj. Acest lucru usureaza foarte mult
munca utilizatorului, acesta nu mai trebuie sa mute circuitul programat din
programator in montajul cu aplicatia propriu zisa. Cu ajutorul unei magistrale
de 34 de linii, pinii integratului sunt conectati la montajul aplicatiei.
Utilizatorul va comuta starea de programare respectiv rulare a aplicatiei de la
un comutator.
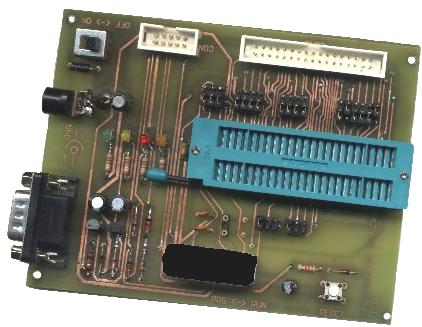
Figura 4.1.1. Programatorul
universal ICSP
Ca aplicatia sa se poata rula,
aceasta implica existenta unor piese pe montajul programatorului.
Alimentarea aplicatiei se face din
exterior, de aceasta data, cu o tensiune stabilizata de 5V DC. Valoarea
tensiunii poate fi modificata in functie de aplicatie, ceea ce inseamna ca se
pot rula si aplicatii de joasa tensiune de la 2V la 5,5V.
Furnizarea impulsurilor de tact este
asigurata de quartz, dimensionat in functie de aplicatie. Desi
microcontrolerele PIC suporta si circuite oscilante RC si rezonatoare, pe
programator exista numai posibilitatea implantarii oscilatoarelor cu quartz.
Frecventa de oscilare poate varia de la zeci de KHz la zeci de MHz (in functie
de aplicatie).
Programatorul este unul proiectat
astfel incat sa poata inscrie mai multe tipuri de microcontrolere din familia
PIC16FXX, PIC16CXX, PIC16FXXX, PIC18FXX, PIC18FXXX si cu posibilitatea
conectarii liniilor necesare programarii prin intermediul unui conector cu 2x5
pini.
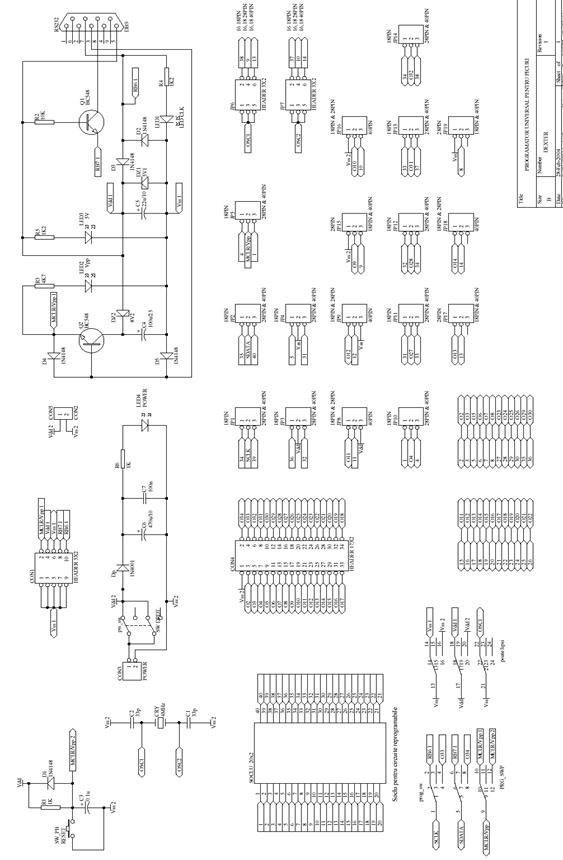
Figura 4.1.2. Schema electrica a
programatorului universal ICSP
Cablul ce conecteaza programatorul
de portul RS232 al calculatorului este un cablu ecranat, pentru minimizarea
erorilor de programare determinate de factorii perturbatori si pentru a putea
mari viteza inscrieri datelor in memoria program.
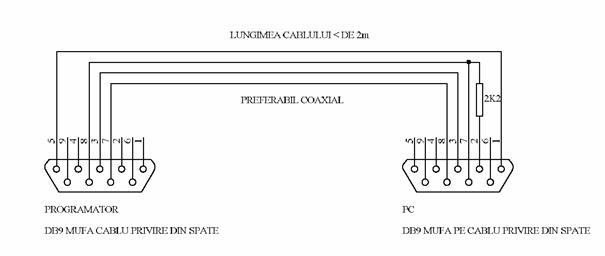
Figura4.1.3. Schema electrica a
cablului serial
Cu ajutorul calaretilor, se poate seta tipul microcontrolerului de
programat. Acestea sunt situati in partea dreapta, intre soclu si conectorul de
magistrala. Calaretii sunt setati pe doua pozitii distincte, intre pinii 1-2
sau 2-3. Acestea stabilesc atat pozitia pinilor de programare cat si
interconectarea iesirilor microcontrolerului la magistrala I/O. Pentru setarea
corespunzatoare a circuitului se utilizeaza tabelul de mai jos :
|
JUMPERI
|
16FXX,18FXX 18 pini
|
16FXXX, 18FXXX 28 pini
|
16FXXX, 18FXXX 40 pini
|
|
JP1
|
|
|
|
|
JP2
|
|
|
|
|
JP3
|
|
|
|
|
JP4
|
|
|
|
|
JP5
|
|
|
|
|
JP6
|
|
|
|
|
JP7
|
|
|
|
|
JP8
|
|
|
|
|
JP9
|
|
|
|
|
JP10
|
|
|
|
|
JP11
|
|
|
|
|
JP12
|
|
|
|
|
JP13
|
|
|
|
|
JP14
|
|
|
|
|
JP15
|
|
|
|
|
JP16
|
|
|
|
|
JP17
|
|
|
|
|
JP18
|
|
|
|
|
JP19
|
|
|
|
Figura
4.1.4.
Setari programator
Montajul este adus in starea de
programare prin mutarea comutatorului, din partea stanga mijloc, pe pozitia
"PRG". In acest moment este posibila programarea microcontrolerului de la
calculator, cu ajutorul programului descris in capitolul urmator. In pozitia
"PRG", microcontrolerul este deconectat de la sursa externa de alimentare. De
asemenea pinii RB7, RB6, Vdd si Vss ai circuitului sunt deconectati de la
magistrala.
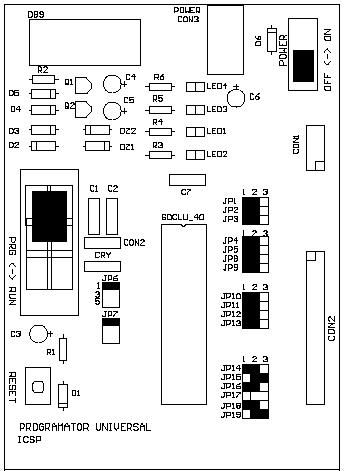
Figura 4.1.5. Amplasarea pieselor
programatorului
Prin intermediul magistralei I/O,
microcontrolerul poate comunica cu montajul aplicatiei. Magistrala este formata
din doua randuri a cate 17 pini, sub forma unui conector. Pentru legatura cu
montajul se poate utiliza o magistrala de 34 de linii, ce se poate gasi in orice
calculator intre unitatea disc flexibil de 1.44M si placa de baza. In cazul
achizitiei de tensiuni analogice, legatura cu cablu magistrala nu este
intotdeauna convenabila deoarece semnalul analogic poate fi perturbat de
celelalte linii.
Programatorul poate fi adus in
starea de aplicatie, in care aplicatia poate rula, prin mutarea comutatorului
pe pozitia "RUN". In acest moment pinii RB7 si RB6 ai microcontrolerului se
regasesc pe magistrala aplicatiei.
In timpul programarii, pinul OSCin
al microcontrolerului este fortat la masa, astfel incat procesorul sa nu poata
genera tactul intern. In momentul rularii OSCin este lasat sa oscileze liber.
In cazul rularii, sursa externa de
alimentare este conectata la microcontroler, acesta avand posibilitatea de rulare.
In parte din dreapta sus a montajului se gaseste comutatorul de conectare al
alimentarii externe la montaj. In cazul prezentei unei tensiuni externe de
alimentare, ledul verde de langa soclu cu maneta, va semnala prezenta acestuia.
Conectarea la portul RS232 al
calculatorului, se va semnala prin aprinderea ledului galben de pe programator.
In cazul in care acesta nu se aprinde este posibil ca mufa sa nu fie
corespunzator conectata la programator sau setarile programului IC-Prog /
PonyProg sa nu fie corespunzatoare.
Programarea microcontrolerului este
semnalata de catre ledurile : rosu si portocaliu. Ledul rosu semnaleaza
prezenta tensiunii Vpp de programare la pinii microcontrolerului si cel
portocaliu, transmiterea datelor spre circuit. In cazul in care aceste leduri
sunt aprinse si pe perioada in care nu decurge programarea, inseamna ca s-au
gresit setarile microcontrolerului. Palpairea intermitenta a acestor leduri in
timpul programarii semnifica buna functionare a programatorului.
Microcontrolerul are posibilitatea de a fi resetat prin butonul de
reset, in timpul rularii aplicatiei. Acesta este asezat in partea din stanga
jos a programatorului.
Pini microcontrolerului vor aparea,
pe magistrala I/O, in functie de setarile facute in felul urmator:
|
Nume port
|
16FXX,18FXX 18 pini
|
16FXXX, 18FXXX 28 pini
|
16FXXX, 18FXXX 40 pini
|
|
RA0
|
|
|
|
|
RA1
|
|
|
|
|
RA2
|
|
|
|
|
RA3
|
|
|
|
|
RA4
|
|
|
|
|
RA5
|
|
|
|
|
RB0
|
|
|
|
|
RB1
|
|
|
|
|
RB2
|
|
|
|
|
RB3
|
|
|
|
|
RB4
|
|
|
|
|
RB5
|
|
|
|
|
RB6
|
|
|
|
|
RB7
|
|
|
|
|
RC0
|
|
|
|
|
RC1
|
|
|
|
|
RC2
|
|
|
|
|
RC3
|
|
|
|
|
RC4
|
|
|
|
|
RC5
|
|
|
|
|
RC6
|
|
|
|
|
RC7
|
|
|
|
|
RD0
|
|
|
|
|
RD1
|
|
|
|
|
RD2
|
|
|
|
|
RD3
|
|
|
|
|
RD4
|
|
|
|
|
RD5
|
|
|
|
|
RD6
|
|
|
|
|
RD7
|
|
|
|
|
RE0
|
|
|
|
|
RE1
|
|
|
|
|
RE2
|
|
|
|
Figura 4.1.6. Pinout-ul
magistralei I/O
Numerotarea
pinilor a fost facuta incepand cu pinul unu, partea stanga sus a magistralei
I/O, vazuta de sus. O descriere detailata a configuratiei pinilor si setarilor
se poate gasi in anexa.
CON2
|
Pin 1
|
Pin 34
|
|
Pin 2
|
Pin 33
|
|
Pin 3
|
Pin 32
|
|
Pin 4
|
Pin 31
|
|
Pin 5
|
Pin 30
|
|
Pin 6
|
Pin 29
|
|
Pin 7
|
Pin 28
|
|
Pin 8
|
Pin 27
|
|
Pin 9
|
Pin 26
|
|
Pin 10
|
Pin 25
|
|
Pin 11
|
Pin 24
|
|
Pin 12
|
Pin 23
|
|
Pin 13
|
Pin 22
|
|
Pin 14
|
Pin 21
|
|
Pin 15
|
Pin 20
|
|
Pin 16
|
Pin 19
|
|
Pin 17
|
Pin 18
|
Figura 4.1.6. Numerotarea pinilor
magistralei I/O
Pinul 1 nu este conectat. Acesta
deserveste doar rolul de reper in momentul conectarii magistralei, pentru a nu
se conecta in mod gresit la aplicatie.
Circuitul se introduce sau se scoate
din soclu numai cand placa nu se afla sub tensiune si programul utilizat este
dezactivat. Circuitul nu se introduce sau extrage in faza de citire sau de
programare.
Programarea microcontrolerelor si
memoriilor se face cu ajutorul programului IC-Prog sau PonyProg.
4.2. Descrierea programului IC-Prog
Programul IC-Prog scris de catre Bonny
Gijzen, este special realizat pentru programarea microcontrolerelor si
memoriilor produse de Microchip, Philips si Scenix. Programul este usor de
utilizat, avand o interfata grafica prietenoasa, cu setari usor accesibile si
posibilitatea de editare a programului in limbaj de asamblare.
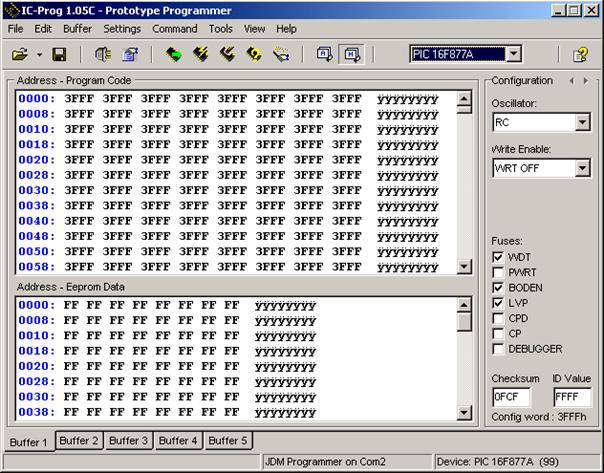
Figura 4.2.1. Interfata IC-Prog
Programul ruleaza sub sistemele de
operare Windows98/2000/NT/XP, pentru Windows2000 si XP avand nevoie de drivere
suplimentare (ce se pot gasi pe internet, pe pagina oficiala IC-Prog).
La instalare, si apoi in timpul
rularii, se seteaza adresa portului COM sau LTP al calculatorului pe care este
conectat programatorul. Programatoarele ce pot fi utilizate cu acest soft sunt
diverse: JDM, Conquest, TAFE, TAIT Serial, FUN-Card, TAIT Paralel, ProPic 2,
SCHAER, STK200, AN589, WILLEPRO, Fluffy, DL2TM, ER1400, etc.
Acestea difera intre ele prin modul de
comunicare cu calculatorul, serial sau paralel.
Atentie la setarea de "I/O delay" ce
introduce o intarziere intre bitii transmisii la portul serial. Deoarece se
doreste o intarziere cat mai mica, este preferat utilizarea unui cablu coaxial
la lungimi mai mari de 1 metru.
De asemenea in acest meniu se pot
alege si modul de comunicare pentru diversele linii utilizate pe programator.
Astfel se poate alege modul normal sau negat pentru liniile de SerialData,
SerialClock, Mclr si Vcc. Acestea functioneaza cu logica normala pentru
programatorul JDM. Interfata se va alege "Direct I/O". Aceste Setari sunt
realizate automat de catre program in momentul instalarii programatorului JDM,
modificarile sunt necesare doar in cazul schimbarii montajului.
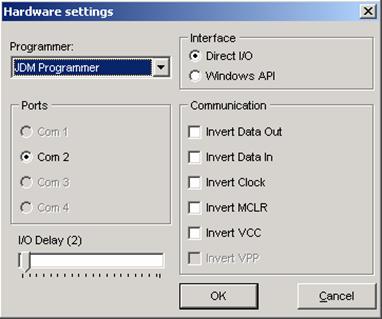
Figura 4.2.2. Setare IC-Prog
Cel mai des utilizat programator
dintre acestea este JDM Programer, deoarece contine putine piese, cost redus si
nu are nevoie de o sursa de alimentare externa.
In cazul in care se doreste o
verificare programatorului, se poate accesa meniul SETTINGS, sub meniul
HARDWARE CHECK.
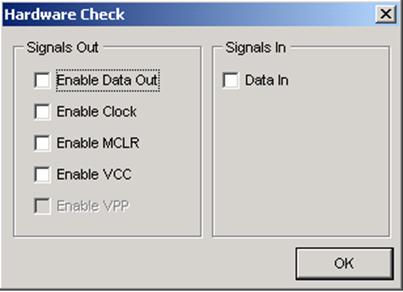
Figura 4.2.3. Meniul Hardware
Check
Acest meniu da posibilitatea
utilizatorului de a verifica corectitudinea conectari liniilor SerialData, Mclr
si Vcc, prin intermediul ledurilor de pe montaj.
Selectarea circuitului de programat
se poate face cu ajutorul butonului special aflat pe meniul principal. Aceeasi
operatiune se poate derula si prin meniul SETTINGS - DEVICE unde apare o lista
de componente clasate in functie de tipuri circuitelor.
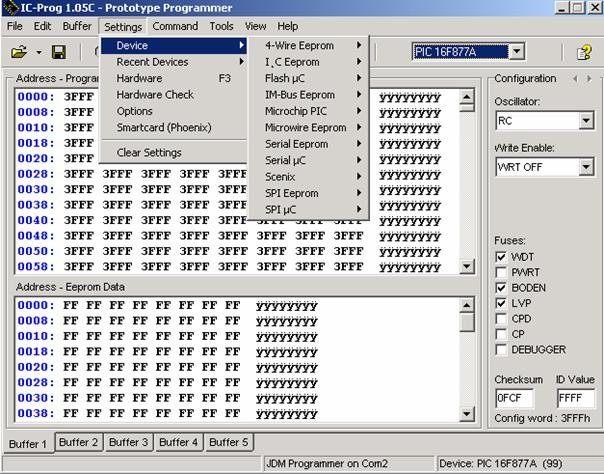
Figura 4.2.4. Alegere circuit
Principiul de functionare al buffer-ului:
Programele utilizate
folosesc un 'buffer', adica o memorie intermediara intre fisierele de
pe disk si circuitele programabile, tabloul hexazecimal poate fi vizualizat pe
ecran. Pentru a programa un circuit folosind date continute intr-un fisier, va
trebui mai intai sa incarcati continutul fisierului in buffer cu ajutorul
comenzii 'Open' din meniul 'File', apoi trebuie sa
transferati continutul din buffer spre circuit cu ajutorul comenzii
'Write' din meniul 'Device' sau 'Program All' din
meniul 'Command' (variaza in functie de programul utilizat). Pentru a
salva datele continute de catre un circuit pe intr-un fisier, va trebui mai
intai sa cititi datele continute de catre circuit cu ajutorul comenzii
'Read' din meniul 'Device' sau 'Read All' din
meniul 'Command', apoi sa salvati continutul buffer-ului intr-un
fisier cu ajutorul comenzii 'Save As' din meniul 'File'.
Este posibila modificarea
buffer-ului pe ecran cu ajutorul unui dublu-clic pe valoarea care se doreste a
fi modificata. Daca se sterge un circuit, continutul buffer-ului ramane pe
ecran, deci, va trebui sa cititi din nou continutul circuitului pentru ca
modificarile sa fie vizibile.
Functiile
Programului IcProg v1.05C
File/Open file:
Deschide codul si datele continute de un
fisier anume.
Inainte de a deschide un fisier trebuie sa
selectati tipul de circuit care va fi programat din meniul "Settings/Device".
Puteti sa cititi diferit formatele fisierelor:
*.hex (IHX) - pentru
fisierele de format Intel 8 bits
*.hex (IHX16) -
pentru fisierele de format Intel 16 bits
*.bin pentru
fisierele binare
*.mot pentru
fisierele de format Motorola-S
*.obj pentru
fisierele proiect
*.e2p pentru
fisierele de format EEPROM
File/Save File As:
Permite salvarea
continutului ferestrei curente cu posibila modificare a numelui fisierului si a
formatului de salvare. Daca se salveaza cu formatul .bin, continutul fisierului
va reflecta exact continutul memoriei circuitului. Daca salvati cu formatul
.hex fisierul va fi codat in formatul Intel 8 bits(IHX8).
File/Open Data File:
Daca incarcati un fisier
pentru un microcontroler continand in mod egal un EEPROM, utilizati meniul
'FileOpen Data File' pentru a incarca partea EEPROM a memoriei.
Continutul EEPROM-ului va fi afisat in fereastra 'Adress-EEPROM
Data'. Puteti citi diferit formatele fisierelor: *.hex (IHX8) pentru fisierele cu format Intel 8 bits, *.hex
(IHX16) pentru fisierele in format Intel 16 bits, *.bin pentru fisierele
binare, *.mot pentru fisierele in format Motorola-S, *.obj pentru fisierele
proiect si .e2p pentru fisierele in format EEPROM.
File/Recent Files:
Permite deschiderea directa
a ultimelor fisiere utilizate de catre program.
File/Exit:
Permite inchiderea
programului. Daca au fost facute schimbari in continutul buffer-ului, programul
va intreba daca doriti sa salvati modificarile.
Edit/Fill Buffer :
Permite initializarea cu
aceleasi valori a continutului complet al buffer-ului 'Address-Program
Code'. Aceasta valoare poate fi scrisa in mod zecimal, hexazecimal sau
ASCII.
Edit/Fill Buffer From:
Permite initializarea cu
aceiasi valoare a unei parti a continutului buffer-ului "Address-Program Code"
continand adresa de inceput si o adresa de sfarsit.
Edit/Copy From Buffer:
Permite copierea in memoria
programului a continutului buffer-ului
"Address- Program Code" selectat cu mouse-ul.
Edit/Paste to Buffer:
Permite transferarea datelor
in memoria programului in buffer-ul:
"Address-Program Code". Adresa este selectata
cu mouse-ul.
Edit/Fill Data Buffer:
Permite initializarea cu
aceiasi valoare a continutului complet al buffer-lui 'Address-EEPROM
Data'. Aceasta valoare poate fi scrisa in mod zecimal, hexazecimal sau
ASCII.
Edit/Fill Data Buffer From:
Permite initializarea cu
aceeasi valoare, a unei parti selectate cu mouse-ul, din continutul buffer-ului
'Address-EEPROM Data'. Aceasta valoare poate fi scrisa in mod
zecimal, hexazecimal sau ASCII.
Edit/Copy from Data Buffer:
Permite copierea in memoria
programului a continutului buffer-ului "Address-EEPROM Data" selectat cu mouse-ul.
Edit/Paste To Data Buffer:
Permite transferul datelor
din memoria programului in buffer-ul "Address-Program Code". Adresa este
selectata.
Settings/Device:
Permite selectarea tipului
de circuit (microcontroler sau memorie) care urmeaza programat.
Urnind circuitul selectat, apar diferite
ferestre:
Daca circuitul poseda o memorie de date si o
memorie EEPROM a codurilor vor aparea doua ferestre.
Continutul ferestrei
'Check Sum' rezulta din adunarea tuturor octetilor care constituie
programul citit din circuit. Acesta permite, de exemplu identificarea unui
program in raport cu un altul pentru a vedea daca sunt identice. Aceasta
valoare se modifica automat daca se modifica programul.
Diferite optiuni vor aparea
de asemenea in cadrul meniului 'Configuration' permitand modificarea
registrelor de configurare. Pentru a cunoaste utilizarea acestor registre trebuie sa consultati datasheet-ul
fabricantului (specificat). In acelasi timp se deschide o fereastra in care va
sunt date cateva informatii pentru microcontrolere PIC.
Puteti alege intre mai multe tipuri de oscilatoare:
- LP : Low Power
Crystal
- XT :
Crystal/Resonator
- HS : High Speed
Crystal/Resonator
- RC :
Resistor/Capacitor
Aceasta selectie depinde de
tipul oscilatorului conectat pe intrarile OSC1/CLKIN si OSC2/CLKOUT ca si de
schema de utilizare a microcontrolerului dupa programare. Pentru modelele XT,
LP si HS un oscilator cu quartz sau un oscilator TTL/C-MOS care este conectat
pe intrarile OSC1/CLKIN si OSC2/CLKOUT. Pentru modul RC, o retea RC este
conectata pe intrarea OSC1/CLKIN (frecventa mai putin precisa).
Configuratia de origine este pozitionata pe
modul RC.
Validarea sau non-validarea
WDT-ului:
Validand aceasta caseta
printr-o cruce, 'Watchdog timer' va fi activat. Adica un oscilator
intern independent de oscilatorul extern va fi functional chiar daca
microcontrolerul este in pozitie de asteptare.
Validarea sau non-validarea a PWRT-ului:
Validand aceasta caseta
printr-o cruce, 'Power-up Timer'-ul va fi activ. Microcontrolerul va efectua la punerea sa sub
tensiune un Reset general pe durata a 72ms, timp in care tensiunea de
alimentare se stabilizeaza.
Validarea sau non-validarea
MCLR-ului:
Validand aceasta caseta
printr-o cruce, 'Memory Clear' va fi activat. Va fi posibila o repunere la zero extern prin
conectarea "GP3/MCLR/Vpp" a microcontrolerului.
Validarea sau non-validarea
CP-ului :
Validand aceasta caseta
printr-o cruce, va fi activat 'Code Protect'. Programul integrat in memoria circuitului nu
va fi citibil daca se face o re-citire a acestuia. In timp ce circuitul poate
fi in continuare sters pentru a putea fi reprogramat, acesta contine o memorie
Flash.
Identificarea unui circuit:
In caseta 'ID
Value', se introduce un numar de identificare care va fi inregistrat
intr-un registru special al circuitului.
Settings/Hardware F3:
Permite configurarea
interfetei de programare intre program si cartela de programare.
Pentru explicatii vedeti mai sus: -->
'instalarea si configurarea programului IC-Prog'.
Settings/Options:
Permite definirea unei
cereri de confirmare atunci cand efectuati o operatie. Aceasta functie este
disponibila pentru a confirma programarea circuitului.
(Programming a device) pentru a confirma
stergerea unui circuit (Erasing a device) si pentru a salva continutul
buffer-ului pe un fisier deja existent (Overwriting a file).
Putem de asemenea sa definim un mesaj de
avertizare pentru ca nici un identificator n-a fost definit pentru un program
dat (ID word is missing in file) si pentru ca nici un cuvant de configurare n-a
fost definit pentru un program dat (Config word is missing in file).
Settings/Smartcard:
Permite setarea de cartele
tip PHEONIX.
Settings/Clear Settings:
Permite anularea valorilor setate anterior.
Command/Read All:
Permite citirea continutului
unui circuit in buffer. Citirea va putea fi facuta la fel de bine pe codurile
de program, ca si pe datele EEPROM-ului, ca si pe continutul registrelor de configurare.
Daca circuitul este protejat
la citire, buffer-ul nu va indica valorile bune si pe ecran se vor afisa 0-uri
(zerouri). In acest caz daca este vorba de o memorie Flash circuitul va putea
fi sters si re-programat normal.
Daca doriti salvarea
continutului unui circuit pe disc, veti utiliza mai intai aceasta functie, apoi
utilizati functia 'Save File As . '.
Daca doriti sa faceti o copie a unui circuit,
veti utiliza mai intai aceasta functie pentru a incarca buffer-ul, schimbati
circuitul, apoi utilizati functia
'CommandProgram All'.
Command/Program All:
Permite programarea continutului unui circuit
plecand de la buffer.
Programarea se va face de asemenea asupra
codurilor de program, ca si a datelor EEPROM-ului, cit si a continutului
registrelor de configurare. In acest caz, asigurati-va ca registrele de
configurare sunt corect pozitionate inainte de a folosi aceasta functie.
Command/Program Config:
Permite programarea in mod
unic a registrelor de configurare a circuitului.
Command/Erase All:
Permite stergerea
continutului unui circuit.
In acest caz toti bitii sunt adusi la nivelul
logic 1. Aceasta functie nu este intotdeauna disponibila (unele circuitele nu sunt programabile decat o
singura data).
Command/Blank Check:
Permite testul de
integritate pentru a verifica daca circuitul este vid. Daca circuitul este nou
sau este sters, toti bitii memoriei vor fi la nivelul logic 1 (FF). Aceasta
functie este utilizata inaintea oricarei programari caci nu este posibil de a
programa un circuit in mod gresit decat daca acesta fie nu a fost nou sau nu a
fost sters in prealabil. Ca efect, o programare pune anumiti biti la nivelul logic 0, inversarea ne putand fi
posibila decat daca circuitul poate fi sters cu ajutorul functiei
'Command/Erase All'.
Command/Verify:
Verifica continutul
circuitului cu cel al buffer-ului. Un mesaj de eroare apare in cazul in care
ceva este in neregula (cablul nu este conectat corectat, programul nu este
configurat corect, cartela nu este alimentata corect).
View/Assembler:
Prin aceasta comanda pe
ecran sunt afisate datele in limbajul de asamblare.
View/Hex View:
Prin aceasta comanda pe
ecran sunt afisate datele in format HEX.
View/Refresh:
Permite reimprospatarea datelor afisate pe
ecran.
Steregerea unui circuit:
Microcontrolerele de tip PIC
12C508/509 nu se pot programa decat o singura data si nu se pot sterge.
Microcontrolerele de tip PIC 16X84 trebuie sa fie sterse cu ajutorul meniului
'Erase' inainte de reprogramare.
Un EEPROM se re-programeaza direct,
fara fie necesara stergerea acestuia in prealabil.
16C84 si 16F84 sunt microcontrolere de 14
biti, deci atunci cand buffer-ul este gol, la fiecare adresa, se va afisa pe
ecran valoarea hexazecimala '3FFFh' (in binar: 11 1111 1111 1111b).
La fel in cazul microcontrolerelor 12C508 si
12C509 care sunt microcontrolere de 12 biti, cand buffer-ul este gol la fiecare
adresa se va afisa pe ecran valoarea hexazecimala 'FFFh' (in
binar: 1111 1111 1111b).
Rezolvarea problemelor curente:
In timpul programarii
sau testului de verificarea a unui microcontroler de tip PIC 12C508, poate
aparea un mesaj de eroare. Microcontrolerele de tip PIC 12C508 contin adesea la
ultima adresa din memorie valori diferite de 'FFFh' chiar si atunci
cand sunt ne-folosite. Pentru a evita acest mesaj de eroare se va citi (READ)
microcontrolerul, notati acesta valoare, incarcati fisierul sursa in buffer si re-scrieti aceasta valoare in buffer la aceeasi
locatie de memorie (ultima adresa).
Copia unui program
dintr-un microcontroler nu functioneaza
decat daca originalul functioneaza. Este posibil de asemenea ca
microcontrolerul sursa sa fie protejat la citire. In acest caz valorile salvate
inainte de copiere nu sunt corecte.
Programatorul nu este detectat de catre calculator
sau de catre Windows ca fiind componenta hardware!
Se verifica ca portul serial sa fie bine declarat in
BIOS si in meniul sistemului Windows.
Se verifica configuratiile de interfata din
meniurile de initializare.
Se verifica activarea corecta a portului setat COM1
sau COM2
Se verifica tensiunea de alimentare sa fie
corecta.
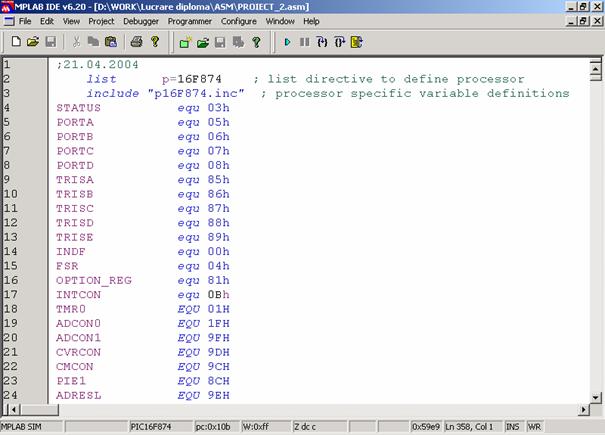
4.3. Mediu de dezvoltare MPLAB IDE
Programul MPLAB IDE si Editorul MPLAB sunt realizate de
catre firma Microchip pentru a fi folosite ca medii de dezvoltare si debug pentru
programatorii de microcontrolere PIC. Acest mediu ofera atat posibilitatea de
editare, compilare, simulare soft(MPLAB SIM) cat si simulare pe platformele
MPLAB ICD2, MPLAB ICE2000, MPLAB ICE4000 si MPLAB SIM30.
 Programul permite inscrierea directa, fara alt program aditional, a
microcontrolerelor rin intermediul platformelor MPLAB ICD2, PICSTAR Plus si PRO
MATE II.
Programul permite inscrierea directa, fara alt program aditional, a
microcontrolerelor rin intermediul platformelor MPLAB ICD2, PICSTAR Plus si PRO
MATE II.
Programele
pot fi scrise pentru o gama larga de microcontrolere din seriile ROM
12CXX,16CXX, 16CXXX, 18CXXX, seriile CR cat si F(Flash).
Figura
4.3.1. Schema electrica de comanda
Editorul ASM
al MPLAB diferentiaza prin culori comenzile , tipurile de variabilele si
adresele, usurand munca programatorului. De asemenea la compilare acesta
creeaza o lista de erori(fisierul *.err) ce sunt afisate utilizatorului in
vederea corectiei. In urma compilari fara erori a programului sunt create
fisierele *.lst, *.cod si *.hex.
Dupa o
compilare reusita se poate simula programul in mod continu sau instructiune cu
instructiune si vizualizarea continutului tuturor registrilor si locatiilor de
memorie.
Structura software-ului
Functiile indeplinite de program trebuie sa
realizeze:
o Achizitie temperatura
o Achizitie ora exacta
o Achizitie data
o Intrerupere setare
o Afisare
Aceste
functii se implementeaza in limbaj de asamblare specific microcontrolerului.
In subcapitolele
urmatoare se vor descrie:
Modul de generare a codului caracterelor ASCI pentru
afisajul matriceal de 7x5 pixeli pe caracter
Schemele logice si implementarea in asamblare pentru:
Programul principal (Main)
Subrutina de achizitie temperatura
Subrutina de achizitie ora exacta
Subrutina de achizitie data
Subrutina de intrerupere si setare timp
Subrutina de conversie format
Subrutina de afisare
Subrutina de transformare a
variabilei din binar in BCD
5.1. Programul generator cod caractere
Programul "Char-Matrix cod generator" se utilizeaza la
generarea codurilor echivalente ASCII pentru afisaje matriceale de 35 (5x7) si
56 (7x8) pixeli. Acesta este necesar pentru generarea cifrelor si textului ce
sunt afisate pe matricea de leduri.
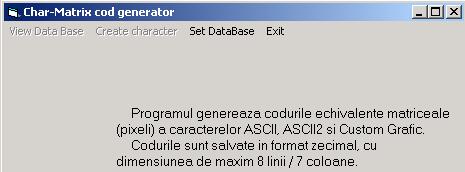
Figura 5.1.1. Char-Matrix cod
generator
Acest program este o simpla aplicatie Visual Basic care
genereaza manual codul fiecarei coloane ce trebuie afisate pentru a forma un
caracter. Aceste valori sunt inscrise in baza de date in format zecimal.
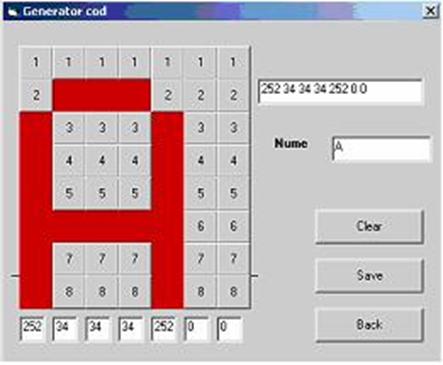
Figura 5.1.2. Generare cod
caracter A
Dupa
apasarea unui buton acesta se coloreaza in rosu, ramanand vizibila forma
caracterului. In partea de jos a ecranului apar codurile echivalente pentru
fiecare coloana. Acestea se pot salva intr-o baza de date (*.mdb Acces)
impreuna cu numele caracterului, prin apasarea butonului Save.
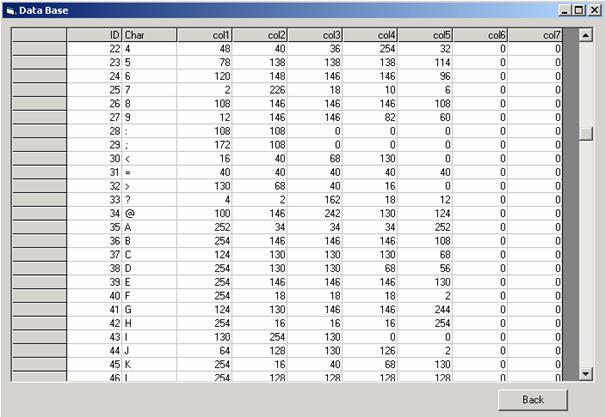 Figura 5.1.3. Baza de date
Figura 5.1.3. Baza de date
5.2. Scheme logice si implementarea
acestora
Schema logica a programului principal - MAIN
Figura 5.2.1. Schema logica principala
- Implementarea programul principal - MAIN
Programul principal este
alcatuit din 5 programe diferite care realizeaza afisarea orei si minutelor,
zilei si lunii, temperaturii, textului static si textului dinamic.
LOOP_MAIN
CALL READ_ORA_EXACTA
;AFISAZA STATIC DE LA ADESA
'51h' 30 DE COLOANE(CU DATE DIN MEMORIA DE ;DATE)
movlw d'210' ;timp de afisare a textului
movwf loops2
ROE
movlw 51H
CALL DISP_MATRIX_30
decfsz loops2,1
CALL READ_DATA_EXACTA
;AFISAZA STATIC DE LA
ADESA '51h' 30 DE COLOANE(CU DATE DIN MEMORIA DE ;DATE)
movlw d'210' ;timp de afisare a textului
movwf loops2
RDE
movlw 51H
CALL DISP_MATRIX_30
goto RDE
CALL READ_TEMPERATURA
;AFISAZA STATIC DE LA
ADESA '51h' 30 DE COLOANE(CU DATE DIN MEMORIA DE ;DATE)
movlw d'210' ;timp de afisare a textului
movwf loops2
RT
movlw 51H
CALL DISP_MATRIX_30
decfsz loops2,1
goto RT
;AFISAZA STATIC DE LA
ADESA '51h' 30 DE COLOANE(CU DATE DIN MEMORIA ;PROGRAM)
CALL TEXT_STATIC
;AFISAZA STATIC DE LA
ADESA '0Ah' 90 DE COLOANE(CU DATE DIN MEMORIA ;PROGRAM)
CALL TEXT_DINAMIC
- Schema logica a subrutinei de achizitie temperatura
Figura 5.2.2. Schema logica - Achizitie
temperatura
- Implementarea subrutinei de achizitie temperatura
Domeniul de
temperatura ce poate fi afisat este cuprins intre -40ºC si +87ºC. De
aici rezulta cuanta convertorului de 5mV / LSB. Pentru valoarea de 500mV, ce
corespunde la 0ºC, convertorul va returna 50h,80 zecimal. Pentru
temperaturi pozitive valoarea convertita depaseste 50h, 80 zecimal. Deoarece
cuanta de 5mV, rezultatul conversiei se va imparti la 2 pentru a obtine
1ºC / LSB. Din aceste calcule rezulta o precizie de 0.5 ºC a
sistemului.
READ_TEMPERATUR
BSF ADCON0,2 ;START CONVERSIE
CALL DELAY0
TL1 NOP
NOP
BTFSC ADCON0,2 ;CONVERSIE
TERMINATA
GOTO TL1
MOVF ADRESH,0
Dupa terminarea conversiei se verifica
daca rezultatul este mai mare (temperatura pozitiva) sau mai mic
(temperatura negativa) de 50h.
Se inscrie semnul temperaturii, valoarea
acesteia, semnul de grad "º " si litera "C"