IDENTIFICAREA SI DECUPLAREA ASISTATE DE CALCULATOR
ALE UNUI SISTEM MULTIVARIABIL SOFTWARE
IN TIMP REAL
1. Obiectivele
lucrarii
Lucrarea urmareste urmatoarele
obiective:
cunoasterea
modului de simulare software in timp real a unui sistem multivariabil, liniar
si continuu;
insusirea
tehnicii de analiza, asistata de calculator, a unui sistem
multivariabil;
intelegerea
comportamentului static si dinamic al unui sistem multivariabil;
insusirea
tehnicii de decuplare stationara si dinamica a unui sistem
multivariabil.
2. Simularea in timp real a unui sistem
multivariabil liniar continuu
Sistemul multivariabil P, simulat in timp
real cu ajutorul calculatorului (fig. 1), are doua intrari ( si
si  ) si doua iesiri (
) si doua iesiri ( si
si  ), care pot lua valori in intervalul 0 100.
), care pot lua valori in intervalul 0 100.
Fig. 1. Sistem multivariabil
cu 2 intrari si 2 iesiri
Fiecare
din cele patru canale intrare-iesire reprezinta un sistem de ordinul
patru (sau mai mic), stabil si cu
timp mort, avand functia de transfer de forma
 , (1)
, (1)
unde  . In cazul
. In cazul  , sistemul are o componenta cu caracter oscilant
amortizat, iar in cazul
, sistemul are o componenta cu caracter oscilant
amortizat, iar in cazul  - sistemul este de
faza neminima (caracterizat printr-un raspuns indicial care are,
in primele momente, o variatie de semn contrar in raport cu valoarea finala).
- sistemul este de
faza neminima (caracterizat printr-un raspuns indicial care are,
in primele momente, o variatie de semn contrar in raport cu valoarea finala).
In
vederea discretizarii, sistemul cu functia de transfer (1) si
completat cu perturbatia  , a fost reprezentat sub forma unei conexiuni serie de patru
subsisteme (fig. 2). Mai departe, fiecare subsistem a fost inlocuit cu
echivalentul sau discret (fig. 3 si fig. 4), astfel:
, a fost reprezentat sub forma unei conexiuni serie de patru
subsisteme (fig. 2). Mai departe, fiecare subsistem a fost inlocuit cu
echivalentul sau discret (fig. 3 si fig. 4), astfel:
 ,
,  ,
,  ,
,
unde  este perioada de
discretizare si
este perioada de
discretizare si
 ,
,  ,
,  ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Constantele de timp  si
si  sunt definite, numai
in cazul
sunt definite, numai
in cazul  , prin relatia
, prin relatia
 .
.

Fig. 2. Descompunerea sistemului
simulat in subsisteme elementare continue
Asupra
fiecaruia dintre cele patru canale intrare-iesire ale procesului
simulat P actioneaza cate o perturbatie. Dinamica unui
canal cu intrarea  , iesirea
, iesirea  si
perturbatia , este descrisa prin ecuatiile:
si
perturbatia , este descrisa prin ecuatiile:
a) cazul (fig.3)
 ; (2)
; (2)
b) cazul  (fig.4)
(fig.4)
 . (3)
. (3)
In simularea dinamicii sistemului
multivariabil se tine seama de faptul ca intrarile canalelor  si
si  , precum si cele ale canalelor
, precum si cele ale canalelor  si
si  , sunt respectiv comune. De asemenea, se are in vedere faptul
ca iesirea este suma iesirilor
canalelor si , iar iesirea este suma
iesirilor canalelor si ,
, sunt respectiv comune. De asemenea, se are in vedere faptul
ca iesirea este suma iesirilor
canalelor si , iar iesirea este suma
iesirilor canalelor si ,
Fig. 3. Descompunerea sistemului simulat in subsisteme elementare discrete
(cazul )

Fig. 4. Descompunerea sistemului
simulat in subsisteme elementare discrete (cazul )
Operatia de
initializare a procesului simulat P consta in aducerea
acestuia intr-un regim stationar, in care intrarile si
iesirile sa aiba anumite valori impuse:  ,
,  ,
,  ,
,  . Initializarea procesului implica
initializarea fiecaruia din cele patru canale intrare-iesire.
Marimea de intrare a canalelor si va fi
initializata la valoarea
. Initializarea procesului implica
initializarea fiecaruia din cele patru canale intrare-iesire.
Marimea de intrare a canalelor si va fi
initializata la valoarea  , iar marimea de intrare a canalelor si va fi
initializata la valoarea
, iar marimea de intrare a canalelor si va fi
initializata la valoarea  . Valoarea initiala
. Valoarea initiala  a iesirii va fi egala cu
suma valorilor initiale ale iesirilor canalelor si , iar valoarea initiala
a iesirii va fi egala cu
suma valorilor initiale ale iesirilor canalelor si , iar valoarea initiala  a iesirii va fi egala cu
suma valorilor initiale ale iesirilor canalelor si .
a iesirii va fi egala cu
suma valorilor initiale ale iesirilor canalelor si .
Daca operatia de
initializare are loc intre momentele de timp  si
si  , atunci ecuatiile de initializare ale canalului
, atunci ecuatiile de initializare ale canalului  , cu intrarea initiala
, cu intrarea initiala  si iesirea
initiala
si iesirea
initiala  , au urmatoarea forma:
, au urmatoarea forma:
 . (4)
. (4)
Dinamica
fiecaruia dintre cele patru canale ale sistemului multivariabil se
stabileste prin alegerea convenabila a celor 7 parametri
asociati: factorul de proportionalitate  , timpul mort
, timpul mort  si constantele de
timp
si constantele de
timp  .
.
Operatia de
initializare se efectueaza atat la lansarea programului (prin
initializarea marimilor , , si respectiv la valorile
65 %, 32 %, 55 % si 45 %), cat si dupa fiecare modificare a unui
parametru al procesului (prin initializarea marimilor , , si respectiv la valorile
lor curente).
3. Problema
decuplarii
Problema decuplarii ideale
consta in proiectarea unui sistem decuplor D inseriat in fata
procesului multivariabil P, care sa aiba un nu numar de
intrari egal cu numarul de iesiri ale procesului, astfel incat sistemul
rezultant sa fie format numai din canale de interactiune
directa. Decuplorul este considerat de tip parametric atunci cand
are o structura dinamica data si parametri de acordare
ajustabili. Cu ajutorul unui decuplor parametric nu se poate realiza, de
regula, o decuplare dinamica perfecta. In majoritatea
aplicatiilor practice este suficienta realizarea decuplarii
stationare si asigurarea unui grad ridicat de decuplare
dinamica. Gradul de decuplare si calitatea decuplarii sunt
puternic influentate de gradul de decuplare al procesului P.
Daca procesul are canalele incrucisate caracterizate printr-o
interactiune relativ puternica, atunci problema decuplarii este
dificil sau chiar imposibil de rezolvat. De remarcat faptul ca prin
decuplare, un sistem de faza minima se poate transforma intr-unul
care sa nu mai fie de faza minima. De asemenea, un sistem
supraamortizat (cu raspuns la intrare treapta fara
supradepasire) poate deveni subamortizat.
Fig. 3. Schema de decuplare
In continuare este prezentat un decuplor
dinamic de ordinul unu, de tip parametric, cu doua intrari si
doua iesiri, care sa satisfaca proprietatile: a)
sa aiba factori de proportionalitate egali cu 1 pe canalele
directe; b) sa aiba cel putin doua canale de tip static (de
ordinul zero). In functie de tipul procesului P, structura decuplorului
prezinta patru forme distincte.
Decuplorul de
tipul 1 are forma
 , (5)
, (5)
 , (6)
, (6)
unde
 ,
,  , (7)
, (7)
Acest decuplor se
utilizeaza atunci cand:
a) canalul direct  este mai rapid decat
canalul incrucisat
este mai rapid decat
canalul incrucisat  ;
;
b) canalul direct  este mai rapid decat
canalul incrucisat
este mai rapid decat
canalul incrucisat  .
.
In conformitate cu matricea de transfer  , decuplorul
, decuplorul  are urmatoarele
ecuatii in domeniul timpului:
are urmatoarele
ecuatii in domeniul timpului:
:  . (8)
. (8)
Decuplorul de tipul 2 are forma
 , (9)
, (9)
 , (10)
, (10)
unde  ,
,  . Acest decuplor se utilizeaza atunci cand:
. Acest decuplor se utilizeaza atunci cand:
c) canalul direct este mai lent decat
canalul incrucisat ;
d) canalul direct este mai lent decat
canalul incrucisat .
In conformitate cu matricea de transfer  , decuplorul
, decuplorul  are urmatoarele
ecuatii in domeniul timpului:
are urmatoarele
ecuatii in domeniul timpului:
:  . (11)
. (11)
Decuplorul de tipul 3 are forma
 , (12)
, (12)
 , (13)
, (13)
unde ,  . Acest decuplor se utilizeaza atunci cand:
. Acest decuplor se utilizeaza atunci cand:
e) canalul direct este mai rapid decat
canalul incrucisat ;
f) canalul direct este mai lent decat
canalul incrucisat .
In conformitate cu matricea de transfer  , decuplorul
, decuplorul  are urmatoarele
ecuatii in domeniul timpului:
are urmatoarele
ecuatii in domeniul timpului:
:  . (14)
. (14)
Decuplorul de tipul 4 are forma
 , (15)
, (15)
 , (16)
, (16)
unde  ,
,  . Acest decuplor se utilizeaza atunci cand:
. Acest decuplor se utilizeaza atunci cand:
g) canalul direct este mai lent decat
canalul incrucisat ;
h) canalul direct este mai rapid decat
canalul incrucisat .
In conformitate cu matricea de transfer  , decuplorul
, decuplorul  are urmatoarele
ecuatii in domeniul timpului:
are urmatoarele
ecuatii in domeniul timpului:
:  , (17)
, (17)
Oricare
ar fi tipul de decuplor, operatia de initializare a
decuplorului consta in aducerea acestuia in regim stationar, astfel
incat  si
si  . Daca operatia are loc intre momentele de timp si , atunci ecuatiile de initializare au
urmatoarea forma:
. Daca operatia are loc intre momentele de timp si , atunci ecuatiile de initializare au
urmatoarea forma:
 ,
,  . (18)
. (18)
Pentru a nu se perturba
procesul P, functia de initializare a decuplorului este
executata dupa fiecare modificare a parametrilor acestuia (cand
valorile initiale ale marimilor  si
si  se iau egale respectiv
cu valorile curente ale marimilor si ). La pornirea aplicatiei, se efectueaza mai intai
operatia de initializare a procesului simulat P, apoi
operatia de initializare a decuplorului D.
se iau egale respectiv
cu valorile curente ale marimilor si ). La pornirea aplicatiei, se efectueaza mai intai
operatia de initializare a procesului simulat P, apoi
operatia de initializare a decuplorului D.
In cazul particular  , conexiunea serie D-P coincide cu subsistemul P,
deci , .
, conexiunea serie D-P coincide cu subsistemul P,
deci , .
Pentru  , prin alegerea convenabila a factorilor de proportionalitate
, prin alegerea convenabila a factorilor de proportionalitate
 si
si  ai decuplorului, se
poate obtine un sistem decuplat stationar. Mai departe, prin alegerea
convenabila a constantelor de timp
ai decuplorului, se
poate obtine un sistem decuplat stationar. Mai departe, prin alegerea
convenabila a constantelor de timp  si
si  ale decuplorului, se
poate obtine un sistem decuplat stationar si cu un grad ridicat
de decuplare dinamica.
ale decuplorului, se
poate obtine un sistem decuplat stationar si cu un grad ridicat
de decuplare dinamica.
Sa consideram
ca matricea de transfer a procesului P are forma simplificata
 . (19)
. (19)
Din conditia de decuplare
stationara  , adica
, adica
 ,
,
rezulta factorii de proportionalitate ai
decuplorului:
 ,
,  (20)
(20)
si factorii de proportionalitate ai
sistemului decuplat stationar:
 ,
,  . (21)
. (21)
In conditiile de decuplare
stationara (20), sistemul cu decuplor tip , are matricea de transfer
 ,
,
cu
 ,
,
 .
.
De aici, rezulta imediat ca
pentru
 (22)
(22)
si
 , (23)
, (23)
avem  si
si  , deci o buna decuplare dinamica.
, deci o buna decuplare dinamica.
In mod similar, obtinem:
-
pentru sistemul cu decuplor tip :
 ,
,  ; (24)
; (24)
-
pentru sistemul cu decuplor tip :
, ; (25)
-
pentru sistemul cu decuplor tip :
, ; (26)
Identificarea subsistemului
multivariabil P si analiza variantele de decuplare
stationara si dinamica se vor face pe baza
reprezentarii grafice, in timp real, a evolutiei in timp a celor
sase variabile ale conexiunii decuplor D - proces P.
4. Programul MULT_SFT
Programul aplicatiei a
fost realizat in limbajul C, pe baza sistemului multitasking in timp real
RTKC45 (RTK - Real Time Kernel).
Studiul
subsistemului multivariabil P, inclusiv in variantele de decuplare
stationara si dinamica, se face pe baza reprezentarii
grafice, in timp real, a evolutiei in timp a celor sase variabile ale
conexiunii decuplor D - proces P (fig. 4). Schema conexiunii este
afisata in partea stanga-sus a zonei de reprezentare
grafica a variabilelor  ,
,  si
si  . Cu ajutorul butonului castaniu din partea superioara a
schemei, aceasta poate fi stearsa sau reafisata pe ecran.
Culorile si forma liniilor de reprezentare a variabilelor sistemului in
schema (continua sau intrerupta), coincid cu cele utilizate la
reprezentarea grafica a evolutiei in timp a variabilelor. Graficele
de variatie a variabilelor
. Cu ajutorul butonului castaniu din partea superioara a
schemei, aceasta poate fi stearsa sau reafisata pe ecran.
Culorile si forma liniilor de reprezentare a variabilelor sistemului in
schema (continua sau intrerupta), coincid cu cele utilizate la
reprezentarea grafica a evolutiei in timp a variabilelor. Graficele
de variatie a variabilelor  si
si  sunt reprezentate cu
linie punctata, iar graficele de variatie a celorlalte patru
variabile sunt reprezentate cu linie continua. Fiecare din cele patru
canale ale decuplorului este reprezentat cu linie continua sau
intrerupta, dupa cum canalul respectiv este de tip static (cu
transfer instantaneu) sau dinamic (cu transfer intarziat). De remarcat faptul
ca in cazul procesului nedecuplat (), graficele de variatie a variabilelor
sunt reprezentate cu
linie punctata, iar graficele de variatie a celorlalte patru
variabile sunt reprezentate cu linie continua. Fiecare din cele patru
canale ale decuplorului este reprezentat cu linie continua sau
intrerupta, dupa cum canalul respectiv este de tip static (cu
transfer instantaneu) sau dinamic (cu transfer intarziat). De remarcat faptul
ca in cazul procesului nedecuplat (), graficele de variatie a variabilelor  si , respectiv
si , respectiv  si coincid si sunt reprezentate cu linie
continua.
si coincid si sunt reprezentate cu linie
continua.
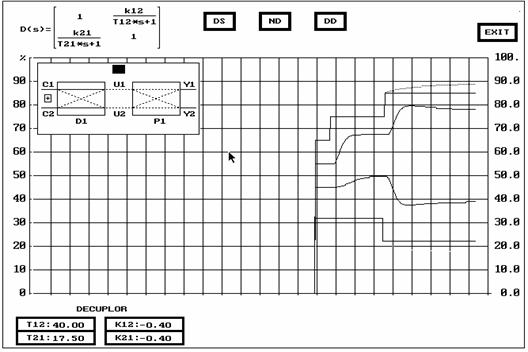
Fig. 4. Ecranul principal
al aplicatiei in cazul decuplorului D1
Modificarea variabilelor de
comanda si se poate face
incremental, efectuand click-mouse pe simbolurile  si
si  (click mouse-stanga
pentru crestere, click mouse-dreapta pentru scadere). Pasul de
incrementare/decrementare se stabileste cu ajutorul butonului din zona
variabilelor si in una din variantele:
pas mic (egal cu 1), pas mediu (egal cu 2), pas mare (egal cu 10). Acest buton
afiseaza caracterul '-' pentru pas mic, caracterul ' ' pentru pas
mediu si caracterul '+' pentru pas mare.
(click mouse-stanga
pentru crestere, click mouse-dreapta pentru scadere). Pasul de
incrementare/decrementare se stabileste cu ajutorul butonului din zona
variabilelor si in una din variantele:
pas mic (egal cu 1), pas mediu (egal cu 2), pas mare (egal cu 10). Acest buton
afiseaza caracterul '-' pentru pas mic, caracterul ' ' pentru pas
mediu si caracterul '+' pentru pas mare.
Valorile parametrilor
asociati dinamicii unui canal al procesului P pot fi vizualizate
prin actionare mouse-stanga asupra portiunii din stanga a canalului.
In ecranul de afisare a valorilor parametrilor unui canal, modificarea
valorii unui parametru se face actionand mouse-stanga asupra zonei de
culoare neagra cu numele parametrului respectiv. Revenirea in ecranul
principal se face cu ajutorul butonului ESC. Simbolul P al procesului
este urmat de o cifra simbolizand varianta de proces prestabilit simulat.
Modificarea variantei de proces se poate face prin actionare
mouse-stanga/dreapta asupra cifrei curente.
Prin actionare
mouse-stanga/dreapta asupra portiunii din dreapta a unui canal al
procesului (dupa introducerea prealabila a parolei) se poate genera
un efect perturbator pozitiv/negativ, echivalent cu efectul unei variatii
de 5 % a variabilei de intrare (de executie).
In partea stanga-sus a
ecranului este afisata structura matricei de transfer curente a
decuplorului, sub una din formele (5), (9), (12), (15). Simbolul D al
decuplorului este urmat de o cifra (1, 2, 3 sau 4), care simbolizeaza
tipul de decuplor. Pentru schimbarea tipului de decuplor se efectueaza
click mouse-stanga/dreapta pe cifra curenta. Valorile parametrilor
asociati tipului curent de decuplor sunt afisate in zona din
stanga-jos a ecranului, iar modificarea valorii unui parametru se
efectueaza prin actionare mouse-stanga asupra butonului
respectiv.
Butoanele ND, DS si DD
din zona centrala sus a ecranului semnifica respectiv starile de
proces nedecuplat, proces decuplat stationar
si proces decuplat dinamic. Comutarea in una dintre aceste
stari prestabilite se poate face prin actionare mouse-stanga asupra
butonului respectiv, dar numai dupa introducerea prealabila a unei
parole. Cu butoanele DS si DD pot fi verificate rezultatelor obtinute
de studenti respectiv la decuplarea stationara si
dinamica a procesului multivariabil analizat.
5. Continutul lucrarii
Lucrarea contine urmatoarele puncte:
a) Determinarea experimentala a
parametrilor subsistemului multivariabil P, presupunand ca matricea
de transfer a acestuia este de forma
 ;
;
b)
Determinarea parametrilor  si
si  ai decuplorului D,
pe baza modelului procesului P (determinat experimental);
ai decuplorului D,
pe baza modelului procesului P (determinat experimental);
c) Analiza
experimentala a sistemului decuplat stationar;
d) Determinarea
experimentala a celor doua constante de timp ale decuplorului D;
e) Determinarea
teoretica si experimentala a factorilor de
proportionalitate ai sistemului decuplat;
f) Reluarea punctelor
anterioare pentru un alt tip de proces.
6. Desfasurarea lucrarii
Imediat dupa lansarea
in executie a programului, sistemul se gaseste in regim
stationar.
a) Mai intai este selectat unul dintre
primele 4 tipuri de proces (din totalul de 12 procese implementate in program,
anume P1, P2, , P12). Privind cele doua ferestre
de afisare a valorilor parametrilor decuplorului (din partea stanga
jos a ecranului), se va observa ca parametrii canalelor incrucisate
ale decuplorului au valoarea nula, adica  ; in consecinta, variabilele de iesire ale
decuplorului au valoarea egala cu cea a variabilelor de intrare (
; in consecinta, variabilele de iesire ale
decuplorului au valoarea egala cu cea a variabilelor de intrare ( ,
,  ).
).
Se va selecta starea
grosiera de modificare a variabilelor de comanda si (evidentiata prin caracterul '+' al
butonului pozitionat intre cele doua variabile), apoi se va modifica
intrarea cu 3-4 incremente. Din
forma de raspuns a marimilor de iesire  si
si  se vor determina
parametrii
se vor determina
parametrii  ,
,  ,
,  si
si  , cu relatiile
, cu relatiile
 ,
,  ,
,  ,
,  .
.
Prin  si
si  am notat duratele de
stabilizare ale iesirilor si, respectiv, .
am notat duratele de
stabilizare ale iesirilor si, respectiv, .
Mai departe, se va modifica intrarea cu 3-4 incremente, iar
din forma de raspuns a marimilor de iesire si se vor determina
parametrii  ,
,  ,
,  si
si  , cu relatiile
, cu relatiile
 ,
,  ,
,  ,
,  .
.
Graficele cu raspunsul sistemului la
variatia treapta a intrarii (egale cu ) si la cea a intrarii (egale cu ), vor fi desenate, cat mai corect posibil, in caiet. In urma
compararii valorilor duratelor de stabilizare si  , respectiv
, respectiv  si , se va alege tipul de decuplor (D1, D2, D3
sau D4):
si , se va alege tipul de decuplor (D1, D2, D3
sau D4):
D1:  ,
,  ;
;
D2:  ,
,  ;
;
D3: , ;
D4: , ;
b) Pentru tipul de decuplor ales la punctul
anterior, valorile si se vor obtine din
valorile factorilor de proportionalitate  determinati la
punctul anterior, pe baza relatiilor (20), anume
determinati la
punctul anterior, pe baza relatiilor (20), anume
, .
Valorile gasite se vor compara cu cele
afisate prin actionarea, cu parola, a butonului de decuplare
stationara DS.
c) Se vor fixa factorii de
proportionalitate si ai decuplorului D
la valorile determinate la punctul anterior, actionand cu mouse-ul asupra
butoanelor de afisare/modificare a valorilor acestor factori.
Intrarea se va modifica sub
forma de treapta (3-4 incremente) si se va urmari
evolutia in timp a iesirilor si . Daca valoarea finala a iesirii (de la sfarsitul
regimului tranzitoriu) nu coincide cu valoarea sa initiala, atunci se
ajusteaza convenabil factorul si se reia
experimentul.
Similar, intrarea se va modifica sub
forma de treapta. Daca valoarea finala a iesirii  nu coincide cu
valoarea sa initiala, atunci se ajusteaza convenabil factorul si se reia
experimentul.
nu coincide cu
valoarea sa initiala, atunci se ajusteaza convenabil factorul si se reia
experimentul.
In ambele cazuri se va
urmari si forma de variatie in timp a marimilor de
iesire si ale decuplorului
(reprezentate grafic cu linie punctata). Graficele cu raspunsul
sistemului vor fi desenate in caiet.
d) Cu relatiile
D1: , ;
D2: , ;
D3: , ;
D4: , ;
se determina constantele de timp ale
decuplorului si se implementeaza in program valorile gasite
(actionand cu mouse-ul asupra butoanelor de afisare/modificare ale
constantelor).
Se modifica intrarea sub forma de
treapta (3-4 incremente), urmarindu-se evolutia in timp a
iesirii , care trebuie sa ramana cat mai
constanta. Operatia se repeta pentru alte valori apropiate ale
constantei de timp  sau
sau  , retinandu-se in final cea mai convenabila
valoare.
, retinandu-se in final cea mai convenabila
valoare.
Similar, se modifica
intrarea sub forma de
treapta, urmarindu-se evolutia in timp a iesirii , care trebuie sa ramana cat mai
constanta. Operatia se
repeta pentru alte valori apropiate ale constantei de timp  sau
sau  , retinandu-se in final cea mai convenabila
valoare.
, retinandu-se in final cea mai convenabila
valoare.
Valorile constantelor de
timp astfel determinate se vor compara cu cele afisate prin
actionarea, cu parola, a butonului de decuplare dinamica DD.
Revenirea la starea
initiala de nedecuplare (in care decuplorul are constantele de timp
nule si  ) se poate face prin actionarea, cu parola, a
butonului ND.
) se poate face prin actionarea, cu parola, a
butonului ND.
e) Factorii de proportionalitate  si
si  ai sistemului decuplat
se calculeaza cu relatiile (21) . Pentru validarea experimentala
a valorilor gasite se procedeaza astfel:
ai sistemului decuplat
se calculeaza cu relatiile (21) . Pentru validarea experimentala
a valorilor gasite se procedeaza astfel:
- se stabilesc
parametrii decuplorului la valorile care asigura cea mai buna
decuplare dinamica;
- se
modifica variabila de intrare sub forma de
treapta (3-4 incremente), iar la sfarsitul regimului tranzitoriu, se
determina  cu relatia
cu relatia  ;
;
- se
modifica variabila de intrare sub forma de
treapta, iar la sfarsitul regimului tranzitoriu, se determina  cu relatia
cu relatia  .
.
f) Se va selecta un alt tip de proces si se vor relua
punctele a), b), c), d) si e).

