|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
1. Obiective
I)Determinarea modelului unui sistem din raspunsul
indicial al acestuia prin metoda Determinarea parametrilor modelelor ca
sisteme de ordinul I sau II din raspunsul indicial.
II)Determinarea modelului
unui sistem din raspunsul pondere al acestuia prin metoda Determinarea
parametrilor modelelor ca sisteme de ordinul I sau II din raspunsul pondere..
III)Determinarea
parametrilor si structurii modelului matematic prin utilizarea metodei
lui Tapkin
IV)Evaluarea metodelor de identificare studiate
2. Metodologia de lucru
I)Determinarea modelului unui sistem din raspunsul
indicial se face prin utilizarea metodei directe de identificare. Astfel
metoda presupune aproximarea sistemelor prin modele de ordinul I sau II.
Alegerea clasei de model se face prin studierea directa a raspunsului
sistemului.
Aproximarea prin model de ordinul I
Daca raspunsul indicial nu prezinta suprareglaj,
sistemul poate fi aproximat printr-un model de ordinul I. Functia de transfer
a unui sistem de ordinul I este:
 (1) (1)
Din raspunsul sistemului indicial se
determina factorul de amplificare , constanta de
timp a sistemului si constanta de timp mort .
II)Determinarea
modelului unui sistem din raspunsul pondere se face prin utilizarea metodei
directe de identificare. Astfel metoda presupune aproximarea sistemelor prin
modele de ordinul I sau II. Alegerea clasei de model se face prin studierea
directa a raspunsului sistemului.
Aproximarea prin model de ordinul I
Daca raspunsul indicial nu prezinta suprareglaj,
sistemul poate fi aproximat printr-un model de ordinul I. Functia de transfer
a unui sistem de ordinul I este
 (2) (2)
Din raspunsul sistemului pondere se
determina factorul de amplificare , constanta de
timp a sistemului si constanta de timp mort.
III) Determinarea parametrilor
si structurii modelului matematic prin utilizarea metodei lui
Tapkin se face prin determinarea constantelor de timp  si si  . Modelul care aproximeaza
sistemul este de ordinul 2. . Modelul care aproximeaza
sistemul este de ordinul 2.
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
Aproximarea prin modele de ordinul II
Functia de transfer in forma generala, in cazul
metodei lui Tapkin:
 (3) (3)
Folosind metoda lui Tapkin se determina
constantele de timp  si si 
Din repr. dreptei  (4) se det. c si b. Se calculeaza (4) se det. c si b. Se calculeaza  , apoi , apoi  . Cunoscand valorile . Cunoscand valorile
 si si  , se poate calcula , se poate calcula  , ,  (5) (5)
Factorul de amplificare Kf se determina din raspunsul indicial.
|
Parametru
|
Valoare
|
Parametru
|
Valoare
|
Parametru
|
Valoare
|
|
Valoarea stationara a intrarii (ust)
|
|
Timp mort ( ) )
|
0.045 sec
|
63% din yst
|
|
|
Valoarea stationara a iesirii (yst)
|
|
Constanta de timp(T)
|
0.65 sec
|
 
|

|
Tabel 1. Parametrii modelului
determinati din raspunsul indicial
3.1 Identificarea modelului pe baza raspunsului la treapta(fisierul
sistem01.p)
Din reprezentarea grafica a raspunsului indicial
(vezi Figura 1) se observa ca sistemul este unul fara suprareglaj, deci
aperiodic, de ordinal doi. In consecinta sistemul va fi aproximat printr-un
model de ordinul 1, cu timp mort.
Din raspunsul indicial se determina
constantele modelului, reprezentate in Tabel 1.
Pentru evidentierea
diferentei dintre dintre sistemul generat de functia ascunsa sistem01 si cel
reprezentat in urma gasirii parametrilor se calculeaza eroarea medie
patratica dinte cele 2 curbe
 (6) (6)
Daca se considera ca sistemul prezinta timp
mort tm = 0.045, functia de
transfer a modelului este:
 (7) (7)
Graficul comparativ
intre raspunsul sistemului si cel al modelului este prezentat in Figura 2. In
urma simularii modelului pe intreg setul de date masurate (N = 3001)
se obtine valoarea indicatorului de calitate:
ISQE =
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
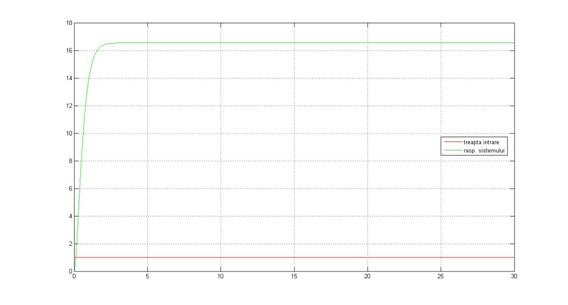
Figura 1. Raspunsul
sistemului la un semnal treapta. Determinarea parametrilor modelului.
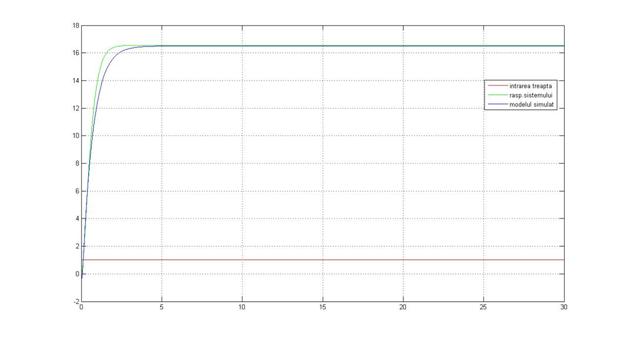
Figura 2. Graficul comparativ intre raspunsul sistemului si cel
al modelului pentru semnalul treapta
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
Acuratetea sistemului obtinut se testeaza folosind un alt tip de
semnal de intrare, de exemplu un semnal impuls. Diferenta intre semnale se
poate observa pe Figura 3. In urma simularii modelului pe
intreg setul de date masurate (N = 10001) se obtine valoarea
indicatorului de calitate:
ISQE = 1468 (9) (9)
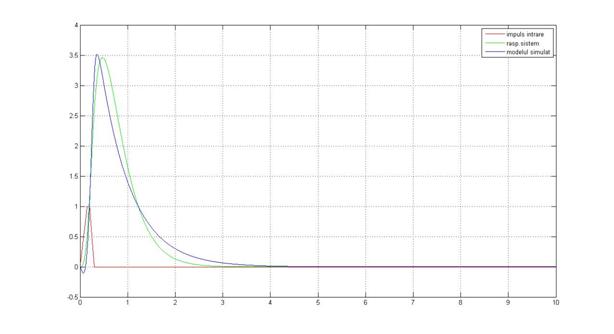
Figura 3. Graficul comparativ intre raspunsul
sistemului si cel al modelului pentru semnalul pondere
3.2 Identificarea
modelului pe baza raspunsului la impuls (fisierul sistem01.p)
Din reprezentarea grafica a raspunsului pondere
(vezi Figura 4) se observa ca sistemul este unul fara suprareglaj, de ordinal
doi. In consecinta sistemul va fi aproximat printr-un model de ordinul 1, cu
timp mort.
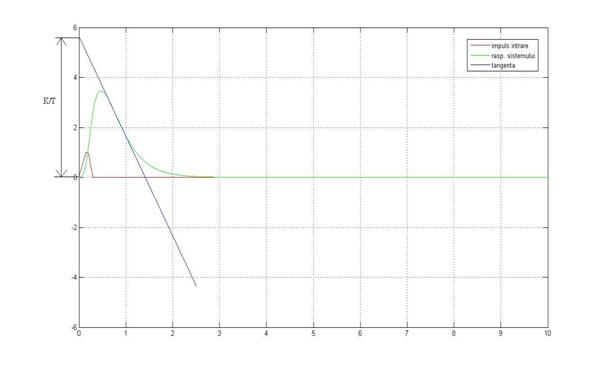
Din raspunsul pondere ( un impuls real vezi Figura 5)se determina constantele
modelului, reprezentate in Tabel 2.
|
Parametru
|
Valoare
|
Parametru
|
Valoare
|
Parametru
|
Valoare
|
Timp mort ()
|
sec
|
37%
|
|

|
|
|
|

|
|
|
|
Tabel 2. Parametrii
modelului determinati din raspunsul pondere
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
Pentru evidentierea
diferentei dintre sistemul sistem01 si cel reprezentat in urma gasirii
parametrilor se calculeaza eroarea medie patratica dinte cele 2 curbe:
 (10)
(10)
Daca se considera ca sistemul prezinta timp
mort tm = 0.0005, functia de
transfer a modelului este:
 (11) (11)
Figura 4. Raspunsul sistemului la un semnal impuls.
Determinarea parametrilor modelului
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
Graficul
comparativ intre raspunsul sistemului si cel al modelului este prezentat in
Figura 5. In urma simularii modelului pe intreg setul de date masurate (N
= ) se obtine valoarea
indicatorului de calitate:

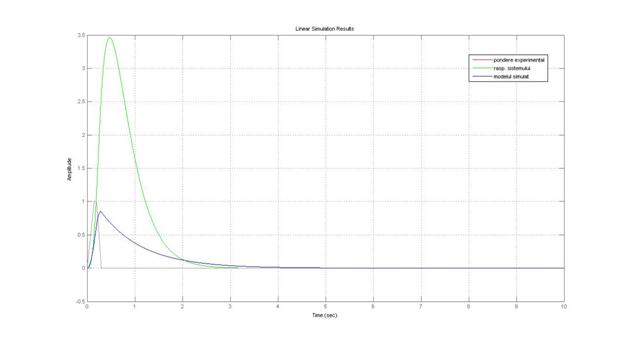
Figura 5.
Graficul comparativ intre raspunsul sistemului si cel al modelului pentru
semnalul treapta
Acuratetea sistemului
obtinut se testeaza folosind un alt tip de semnal de intrare, de exemplu semnalul
treapta. Diferenta intre semnale se poate observa pe Figura 6. In urma simularii modelului pe intreg setul de date
masurate (N = 3001) se obtine valoarea indicatorului de calitate:
ISQE = 6.28 (13)
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
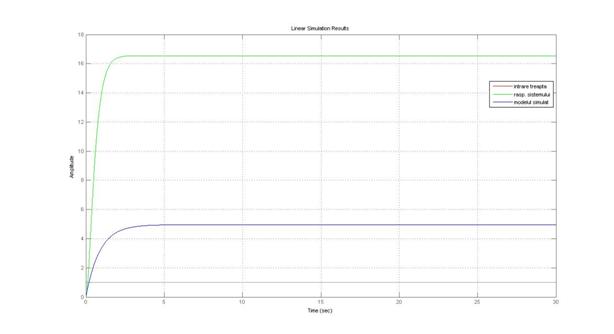
Figura 6.
Graficul comparativ intre raspunsul sistemului si cel al modelului pentru
semnalul treapta
3.3 Identificarea modelului prin metoda
lui Tapkin
Se cunoaste
raspunsul pondere al unui sistem tehnic oarecare determinat in mod
experimental in urma aplicarii uni semnal de excitatie asimilabil cu un
impuls (vezi Figura 7) . Vom utiliza metoda lui
Tapkin iar modelul posibil al dinamicii sistemului va fi de forma :
 (14) (14)
unde
Kf va fi amplitudinea sistemului la raspuns treapta de la punctul 3.1 ,  si si  sunt parametrii cu rol de
constante de timp ce vor fi determinati din ecuatiile : sunt parametrii cu rol de
constante de timp ce vor fi determinati din ecuatiile :
 (15) (15)  (16) (16)  (17) (17)  (18) (18)
 (19) (19)  (20) (20)
Reprezentarea
grafica a relatiei   ( 21 ) pentru mai multe valori succesive
care dau rapoartele ( 21 ) pentru mai multe valori succesive
care dau rapoartele  / / si si  / conduce la obtinerea unei multimi de puncte grupate in
jurul unei drepte. Din aceasta reprezentare se pot obtine valorile
coeficientului unchiular b si al ordonatei in origine c. Dupa gasirea
valorilor lui c si b se obtin si / conduce la obtinerea unei multimi de puncte grupate in
jurul unei drepte. Din aceasta reprezentare se pot obtine valorile
coeficientului unchiular b si al ordonatei in origine c. Dupa gasirea
valorilor lui c si b se obtin si
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
Parametru
|
Valoare
|
Parametru
|
Valoare
|
Parametru
|
Valoare
|
Param.
|
Valoare
|
c
|
|
T
|
|

|
|
|
|
b
|
|

|
|

|
|
K
|
|
Functia de transfer
are forma:
Graficul comparativ intre raspunsul
sistemului si cel al modelului este prezentat in Figura 7. In urma simularii
modelului pe intreg setul de date masurate (N = 1001) se obtine
valoarea indicatorului de calitate:

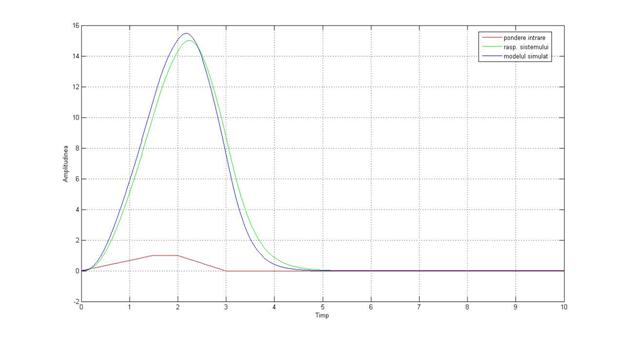
Figura 7.
Graficul comparativ intre raspunsul sistemului si cel al modelului pentru
semnalul de tip impuls
Acuratetea sistemului
obtinut se testeaza folosind un alt tip de semnal de intrare, de exemplu treapta.
Diferenta intre semnale se poate observa pe Figura 6. In urma simularii modelului pe intreg setul de date
masurate (N = 3 ) se obtine valoarea indicatorului de calitate:
ISQE =
1389(24)
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
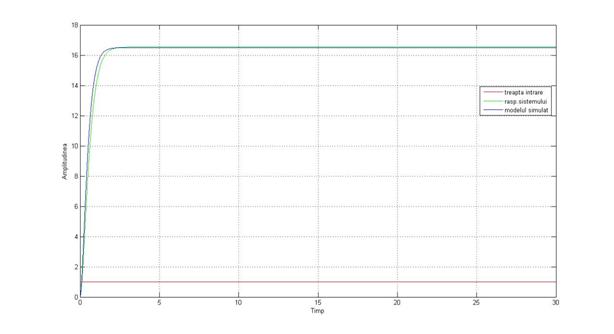
Figura 8.
Graficul comparativ intre raspunsul sistemului si cel al modelului pentru
semnalul de tip treapta
4. Centralizarea Datelor
Se construieste un tabel centralizator ce contine
modelele identificate si indicii de calitate determinati in functie de
intrarea sistemului si metoda utilizata.
|
Intrare
|
H(s)
|
ISQE
|
|
Treapta
|
|

|
|
Pondere exp.
|
|

|
|
Pondere exp.(Tapkin)
|
|
|
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
Concluzie
Metoda 1: Se identifica un sistem de
ordin superior cu un sistem de ordin 1 cu timp mort, pentru un semnal de tip
treapta. Se obtine o eroare relative mica. Daca la acest sistem aplicam un al
tip de semnal (pondere) observam ca eroarea scade.
Metoda 2: Identificam un sistem de ordin
superior cu un sistem de ordin 1 cu timp mort, dar pentru un semnal de tip
impuls. Eroarea obtinuta pentru semnalul de tip impuls sunt relativ scazute,
dar daca aplicam un alt tip de semnal(treapta)
eroarea creste considerabil.
Metoda 3:Identificam
un sistem de ordinul 2 prin metoda Tapkin . Eroriile obtinute la aceasta
metoda sunt relative mici (subunitare).
6.
Probleme de studiu
1. Pentru un sistem de ordinu intai de
forma  (*) sa se deduca relatia: (*) sa se deduca relatia:
Vom
aplica transformata invers Laplace asupra ecuatiei(*):



 => =>  => =>
 ) => ) => 
Dupa
normarea sirurilor de date masurate (impartirea fiecare element al sirului de
date cu valorea maxima masurata), obtinem:  . .
In
cazul in care nu se asigura normarea sirului de date masurate, iesirea este
aproximata prin curba:
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
Model de ordin 2 obtinut:
 
Aplicam
ecuatiei transformata invers Laplace:
0.25 
Notam:  , , 


 , ,
Modelul de ordinul 2: (25)
Raspunsul in
frecventa(diagrama Bode):
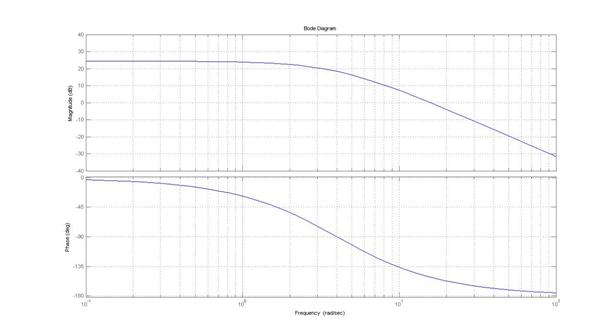
Figura 9. Diagrama
Bode pentru modelul (25)
|
|
Pag.
|
|
Student
|
Grupa
|
ructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
Verificam
parametrii modelului:
Functia de transfer in general: 
Identificam
coeficientii:  , ,    , , 
Amplificarea statica:  
4. Vom utiliza modelul de ordinul 2:
Din Figura 9 citim
frecventa de taiere a modelului:  , ,  
Perioada de
esantionare este de T=0.01 sec  , ,  
Concluzie: . .
Modelul
determinat prin metoda lui Tapkin:
Vom utiliza modelul de
ordinul 2:
Calculam cat timp
este masina pe denivelarea de lungime 20 cm, luand in considerare viteza
automobilului. Acesta este necesar pentru calcularea impulsului, care va
aproxima denivelarea, si care va fi intrarea sistemului.
Durata impulsului: 
Amplitudinea
impulsului este de 15 cm.
Impulsul este dat
la t=10 sec, si durata ei este 0.002sec.
Deci intrarea va
arata astfel:
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
|
Universitatea Tehnica din Cluj Napoca
|
Catedra de
Automatica
|
|
Disciplina:
|
Identificarea
Proceselor
|
|
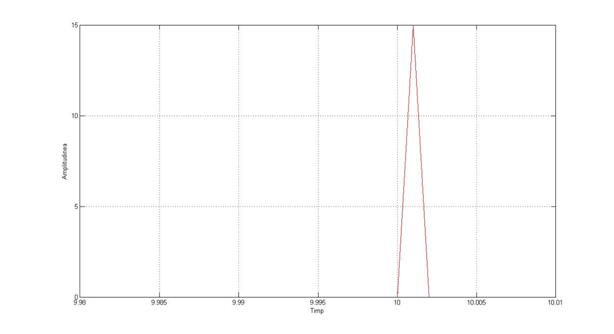
Figura 10.
Impulsul dat la intrarea modelului (25)
Domeniul de timp: t=[0,20].
Raspunsul modelului la acest impuls:
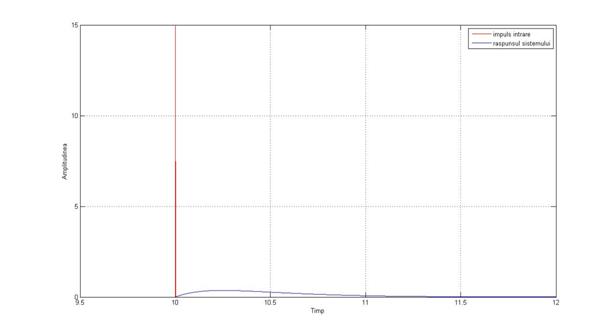
Figura 11.
Raspunsul modelului (25)
Prin aparitia denivelarii(aplicam impulsul)
sistemul suspensie auto "iese" din starea lui stabila, incercand sa diminueze
impactul cu denivelarea, si dupa un timp de aproximativ 2 sec(se citeste de pe
grafic), dupa care revine in stare stabila.
|
|
Pag.
|
|
Student
|
Grupa
|
Instructor
|
|
din
|
|
|
|
|
| | | | | | |