Procedee de determinare a pozitiei
Determinarea pozitiei navei cu relevmente
Liniile
de pozitie se obtin prin masurarea
cu alidada montata pe repetitorul giro (Rg) sau compasul magnetic (Rc), situatie in care se foloseste o alidada
dintr-un material amagnetic.
Procedeul ofera expeditivitate si o buna precizie, masurarea
relevmentelor fiind comoda si sigura. Pentru o buna precizie
este important sa se urmareasca eliminarea posibilelor erori si sa se acorde o atentie deosebita
la alegerea reperelor si masurarea relevmentelor. Astfel trebuie avute in
vedere urmatoarele criterii:
obiectele sa fie vizibile de la alidada si sa fie trecute
cu precizie in harta;
relevarea cu prioritate a
obiectelor situate la o inaltime cat mai mica fata de orizont, pentru
eliminarea erorii date de inclinarea alidadei. Aceasta regula trebuie
respectata in primul rand atunci cand marea este montata;
relevarea
cu prioritate a reperelor mai apropiate de nava;
alegerea
reperelor astfel incat sa ofere o intersectie favorabila a liniilor de pozitie;
unghiul optim de intersectie este 900 pentru determinarea cu doua
relevmente, 60o sau 120o cand se folosesc trei repere;
sa se identifice cu atentie reperele;
sa se masoare relevmentele la timp cat mai scurt unul
dupa altul, incepand cu cel mai apropiat de axa longitudinala a navei si
terminand cu cel mai apropiat de travers;
pe timpul noptii, relevarea mai intai a farurilor cu semnalul luminos mai
scurt si apoi a celui cu semnal luminos mai lung;
mentinerea alidadei in planul vertical al obiectului
observat pe timpul masurarii.
Determinarea pozitiei cu trei relevemente simultane
Algoritm:
se
identifica reperele si se masoara relevementele la timp cat mai scurt unul dupa
altul tinand cont de ordinea recomandata; simultan se citesc ora si lochul;
se
convertesc relevmentele (din relevment giro sau compas in relevment adevarat)
si se traseaza pe harta;
se
determina pozitia navei ca fiind:
o
punctul
de intersectie al celor trei drepte
de relevment (caz ideal foarte rar intalnit - Fig. 3.3.1);
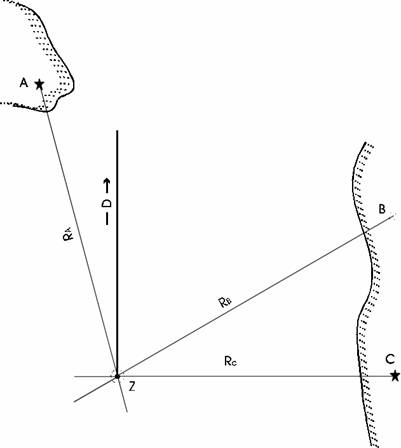
Fig. 3.3.1
o
centrul
de greutate al triunghiului
erorilor (obtinut prin intersectia doua cate doua a celor trei drepte de
relevment dupa trei puncte), atunci cand acesta are laturile mai mici de o mila
marina;
prin
eliminarea erorii sistemetice ce afecteaza masuratorile cu una din metodele:
a)
Procedeul triunghiurilor asemenea: se reduce sau se mareste valoarea celor trei relevmente
cu 20-50, obtinandu-se un nou triunghi, asemenea cu
primul. Punctul se afla la intersectia
dreptelor ce unesc varfurile de acelasi nume.
b)
Procedeul locurilor de egala diferenta de relevment: se calculeaza unghiurile a = RB - RA si b = RC -
RB ca diferente intre relevmentele la primul si al doilea reper si,
respectiv, al doilea si al treilea. Punctul se obtine la intersectia arcelor
capabile de unghiurile a si b
Determinarea punctului navei cu doua relevmente succesive
la doua obiecte
Algoritm :
Se
releveaza obiectul A in relevmentul RA si, simultan, se citesc ora
bordului si lochul (cl1). Se traseaza relevmentul adevarat RA prin reperul A ;
intersectia acestuia cu drumul navei este punctul Z1 ;
in
momentul cand apare in vedere obliectul B, se ia relevmentul RB la
acesta. Simultan se citesc ora bordului si lochul (cl2), Se traseaza
relevmentul adevarat RB prin reperul B ;
se
calculeaza distanta parcursa de nava in intervalul de timp dintre
observati : m = f (cl2 - cl1) ;
cu
o deschizatura de compas egala cu m
si cu originea in Z1, se intersecteaza drumul navei in Z2,
care reprezinta punctul estimat al navei in raport cu Z1 ;
se
traseaza relevmentul RA prin Z2 si la intersectia dreptei
de relevment transportata R'A cu relevmentul RB se obtine
punctul observat-estimat al navei Z (Fig. 3.3.2).
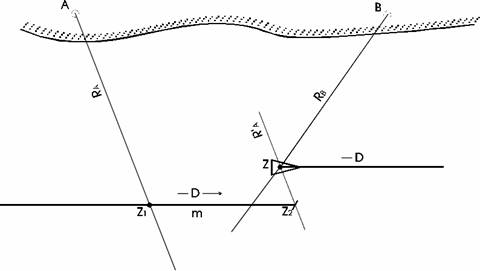
Fig. 3.3.2
Determinarea punctului navei cu doua relevmente succesive la un singur
obiect
Presupunand ca avem in vedere un singur reper A (Fig.
3.3.3), punctul navei se determina cu doua relevmente succesive la acesta,
prima dreapta de relevment R1 fiind transportata pentru momentul
ultimului relevment R2, functie de drumul D urmat de nava si
distanta m parcursa in
intervalul de timp dintre observatii
(astfel incat sa existe o variatie a relevmentului de minim 30
Rezolvarea grafica pe harta este similara cu cea
prezentata pentru cazul determinarii punctului navei cu doua relevmente
succesive la doua obiecte.
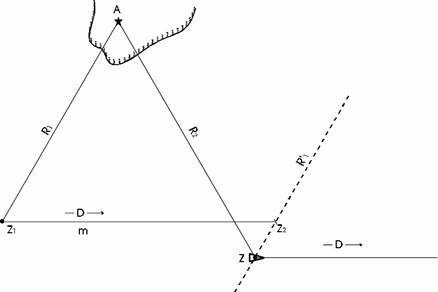
Fig. 3.3.3.
Determinarea
punctului navei cu doua unghiuri orizontale
Consideram ca avem in vedere trei repere A, B si C
la care se masoara unghiurile orizontale a intre A si B respectiv b intre B si C.
Pentru a determina punctul navei cu cele doua unghiuri
orizontale se folosesc frecvent urmatoarele doua procedee :
Procedeul
arcelor de cerc capabile de unghiurile a si b
Procedeul segmentelor.
Prezentam in continuare aceste doua procedee.
Procedeul arcelor de cerc capabile de unghiurile a si
b
Presupunand ca observatiile sunt simultane, punctul navei
se obtine prin trasarea arcelor de cerc capabile de unghiurile a si b (fig. 3.3.4), care se
construiesc pe harta. La intersectia celor doua arce de cerc se afla punctul
observat al navei Z.
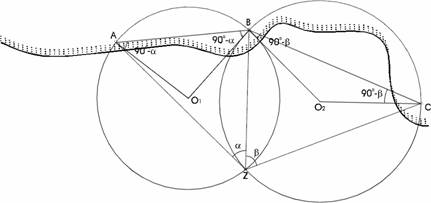
Fig.
3.3.4
Procedeul
segmentelor
Se
realizeaza urmatoarele constructii geometrice (fig 3.3.5) :
Din punctul central B se traseaza dreptele
BF si BG, care formeaza cu AB si BC unghiurile 90 a si respectiv 90 b
Din A si C se ridica perpendicularele AH si CL, pe AB si
respectiv CB. Acestea intersecteaza dreptele BF si BG in M si respectiv, P;
Se unesc intersectiile M si P. Piciorul perpendicularei Z
coborata din B pe dreapta MP reprezinta punctul observat al navei Z.
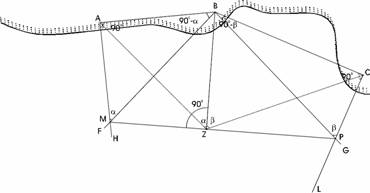
Fig. 3.3.5.
Determinarea punctului navei cu distante
Cazul distantelor simultane
Distanta masurata la un reper de navigatie determina o
linie de pozitie de forma unui cerc, care are centrul in reperul observat si
raza egala cu distanta masurata.
Consideram ca s-a masurat distanta d1 la
reperul A si distanta d2 la reperul B (fig. 3.3.6). Pentru
determinarea pozitiei navei se traseaza cele doua cercuri de egala distanta, de
raza d1 si respectiv d2, avand centrele in A si B; la
intersectia lor se obtine punctul navei Z.
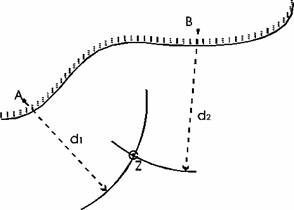
Fig.
3.3.6
Cazul
distantelor succesive
Sa presupunem ca nava merge in drumul D si se masoara
sucesiv distanta d1 la obiectul A si apoi d2 la reperul B
(fig. 3.3.7). Spatiul parcurs de
nava intre observatii este m.
Algoritm :
Se traseaza cercul de pozitie de raza d2 cu
centrul in B ;
Se transporta reperul A in A1, in drumul D si
distanta m parcursa de nava in intervalul de timp dintre observatii ;
Se traseaza cercul de pozitie de raza d1 cu
centrul in A1. La intersectia acestui cerc de pozitie transportat,
de raza d1, cu cercul de
egala distanta d2, se afla punctul observat-estimat al navei
Z.
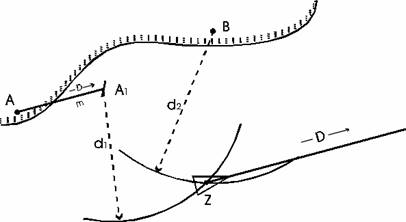
Fig. 3.3.7

