MONTAREA ROBOTIZA A UNUI CIP PE PCB
1.Introducere
1.1
Robotul. Generalitati
Robotul este un sistem
mecatronic mobil, destinat automatizarii interactiunii omului cu
mediul in care evolueaza. Denumirea de "robot" a fost folosita prima data de scriitorul ceh Karel
Čapek in piesa de teatru 'Robotii universali ai lui
Rossum', 1920. Cuvantul 'robot'
este de origine slava si defineste o munca executata
fortat.
Aparitia
robotilor in epoca actuala poate fi justificata si prin
necesitatea adecvarii omului la mediu, in scopul cresterii
productivitatii intractiunii cu mediul prin diminuarea efortului
necesar realizarii si cresterea calitatii produselor.
Initial robotii erau folositi in principiu pentru realizarea
operatiilor de manipulare, operatii care mai puteau fi realizate
si cu ajutorul manipulatoarelor. Se doreste a nu se face confuzie
intre termenii de manipulatoare si roboti pentru operatii de
manipulare deoarece ultimii amintiti au o structura mecanica
mult mai complexa si sunt condusi dupa programe flexibile,
iar primii mentionati au o structura mecanica
simpla si sunt condusi
dupa programe rigide.
Daca mediul este inaccesibil omului
care trebuie sa realizeze interactiunea, adecvarea omului cu mediul
se va face cu ajutorul instalatiilor de teleoperare cand operatorul uman
se afla in partea accesibila a mediului si comanda de la
distanta actiunea instalatiei aflate in partea mediului
inaccesibila omului pe baza unor informatii culese in timp real.
Referitor la deficientele pe care le
are, operatorul uman poate fi corelat cu mediul prin intermediul protezelor,
purtate de bolnav, care-i inlocuiesc portiunea deficitara, sau a
ortezelor care doar suplinesc anumite deficiente. Tot in aceasta
sfera intra si exoscheletele amplificatoare care se
ataseaza organismului sanatos permitand manipularea
unor greutati care depasesc capacitatile fizice
ale omului normal, sau in conditiile unei acceleratii
gravitationale ce depaseste conditiile
pamantesti.
Robotica este definita ca fiind domeniul de
stiinta tehnica ce are ca obiect cercetarea
automatizarii interactiunii omului cu mediul in care
traieste.
Astfel, pot fi
incluse in robotica cercetarile referitoare la conceptia,
constructia si utilizarea robotilor, a diferitelor sisteme,
masini, dispozitive, care lucreaza fara interventii
continue sau interventii la intervale regulate ale omului, fiind utilizate
pentru producerea de bunuri materiale sau la prestarea de servicii, ca si
in preocupari legate de senzorica, actorica si
inteligenta artificiala.
Prin definitia ei, robotica este un
domeniu multidisciplinar a carui componenta este
evidentiata in fig.1.1.:
Fig. 1.1. Robotica, domeniu multidisciplinar.
 Dar si rezultatele roboticii sunt utilizate de asemenea in domenii
multiple evidentiate in fig. 1.2:
Dar si rezultatele roboticii sunt utilizate de asemenea in domenii
multiple evidentiate in fig. 1.2:
Fig. 1.2. Robotica, aplicatie in alte domenii.
O clasificare a
robotilor se poate face astfel:
v roboti stationari,
imobili fata de anumite componente ale mediului in care
evolueaza;

Fig. . Roboti stationari
v roboti mobili:
vehicule ghidate automat care se deplaseaza pe roti sau
senile;
masini pasitoare care realizeaza deplasarea pe sol
pe principiul pasirii;
masini taratoare care realizeaza deplasarea pe principiul
tararii.
Functiile robotului sunt:
cresterea productivitatii
muncii umane (a eficientei interactiunii
acestuia cu mediul);
adecvarea omului cu mediul cu care el interactioneaza.
Cresterea productivitatii
muncii rezulta din insasi inlocuirea omului in
activitatile necreative, repetitive, plictisitoare, prin
cresterea vitezei si preciziei cu care lucreaza robotul
fata de cazul cand operatiile sunt executate de catre om.
Adecvarea la mediu permite
eliminarea influentei nocive a acestuia asupra omului (caldura -
frig, lumina - intuneric, vibratii - socuri, mediu agresiv
chimic, atmosfera poluata, monotonie etc.), desfasurarea
activitatii in medii inaccesibile omului (radioactiv, subacvatic,
extraterestru etc.), sau interactiunea unui om cu deficiente cu un
mediu normal.
In conformitate cu functiile
mentionate robotul poate fi utilizat in aplicatii industriale sau
neindustriale producatoare de bunuri materiale sau prestatoare de servicii
(fig. 1.4.).
Robotii industriali lucreaza in
cadrul sistemelor de fabricatie robotizata.
Fig. Clasificarea aplicatiilor robotilor.

Fig. 1.5. Exemple de aplicatie a robotilor
Din
punct de vedere structural, robotul este definit ca fiind un sistem,
adica un ansamblu de elemente componente, denumite subsisteme, si
conexiunile dintre acestea. Din punct de vedere ierarhic, sistemele pot fi:
de rang 1, sistemele;
de rang 2, subsistemele sistemelor de rang 1;
de rang 3, s.a.m.d.
Structura sistemului robotic
poate fi reprezentata prin scheme
bloc, respectiv matricea de
structura iar legaturile dintre elementele componente prin matricea de cuplare. Initial robotii erau imaginati ca
sisteme similare omului, similitudine care nu era eronata daca este
considerata din punct de vedere al functiilor indeplinite de cele
doua sisteme, ci nu din punct de vedere constructiv.
Fig. 1.6 Structura sistemului robotic
Astfel:
sistemul mecanic al robotului are rolul scheletului uman si este definitoriu
in delimitarea naturii si amplitudinii miscarilor care se pot
realiza;
sistemul de actionare este echivalentul sistemului muscular al omului impunand miscarea
relativa a elementelor mecanismelor care constituie elementele sistemului
mecanic;
sistemul de comanda, echivalentul sistemului nervos uman, prelucreaza
informatiile de la sistemul mecanic si emite comenzi spre sistemul de
actionare;
grupul hidraulic, echivalentul aparatului digestiv, respirator si circulator,
este destinat prepararii si realizarii circuitului fluidului
purtator de energie;
traductoarele si
aparatele de masura, ca si senzorii
sunt echivalentul organelor de simt umane, furnizand informatii
despre starea interna, respectiv externa a mediului.
In componenta sistemului mecanic al
robotului intra sistemul de conducere care are ca
subsisteme sistemul de comanda si pe cel de actionare.
Prin mediu se intelege spatiul
in care evolueaza robotul, cu obiectele pe care le contine si
totalitatea fenomenelor care au loc in acest spatiu.
Mediul poate fi impartit in:
mediu natural - spatiu
nestructurat;
mediu industrial - spatiu
structurat.
Conexiunile robotului cu obiectele din
mediu pot fi:
directe: informatii transmise
de la sistemul de conducere la sistemul de actionare, informatii
transmise de la sistemul de actionare la cuplele cinematice
conducatoare si fluxurile energetice;
inverse: informatiile primite
de la robot de catre senzori si traductoare.
Sistemul mecanic al
robotilor este echivalentul
sistemului osos uman si are rolul de a asigura realizarea
miscarilor robotului si transmiterea energiei mecanice necesare
interactiunii cu mediul si are ca subsisteme dispozitivul de ghidare
si efectorul final:
2.Memoriul Tehnic
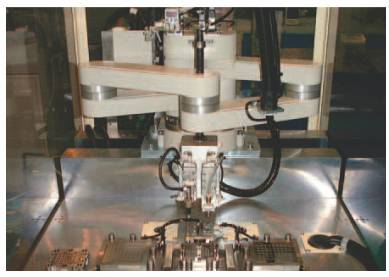
Robotii de tip SCARA cu dublu brat
Caracteristica generala a acestor roboti este
data de viteza super rapida si de
precizia foarte inalta cu care executa operatiile.
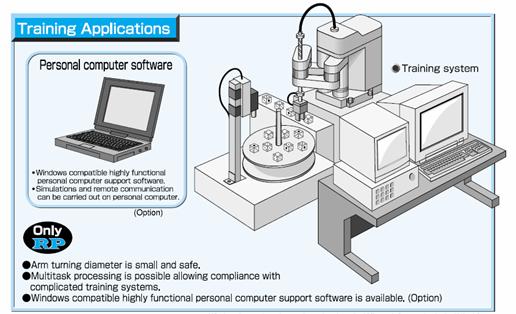
Tipurile de roboti SCARA cu dublu brat
sunt prezentate in figura de mai jos:

Robotul RP-1AH se foloseste la montare precisa a unor piese de
dimensiuni mici in spatii de dimensiuni foarte mici. El are o
suprafata de amplasare de circa 200x160 mm, iar bratul poate ajunge
la o distanta de 236 mm.
Precizia de pozitionare a obiectelor este de ± 0.005 mm. Datorita vitezelor mari de lucru un
ciclu pick and place se poate realiza intr-o perioada < 0.5 s. Rotirile simultane pe axa Z se realizeaza
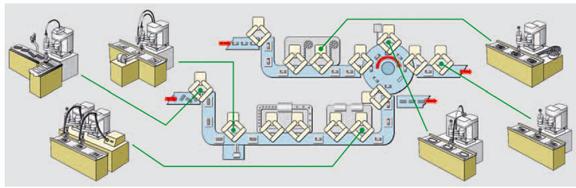
cu o viteza de 3000 deg/s. Prin dimensiunile lui compacte robotul RP se
foloseste cu precadere in domeniul de Micro-Handling. De exemplu la micro-montaj sau la plantare si lipirea pieselor
electronice pe PCB in cadrul fabricari telefoanelor mobile. In imaginea de
mai jos este reprezentat un sistem de fabricatie in care sunt
implementati roboti RP-1AH:
Utilizarea acestor roboti in comparatie cu masinile automate
aduce avantajul unu grad mare de flexibilitate si duce astfel la marirea
eficientei in productie.

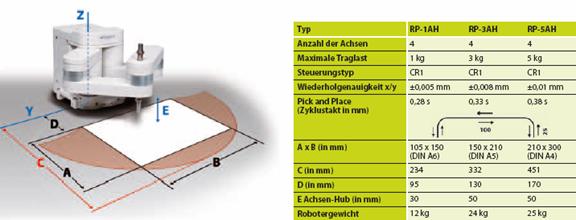
Axele de miscare ale robotilor
RP-1AH, RP-3AH, RP-5AH
Pentru
aplicatiile in care este nevoie masa utila mai mare sau de o lungime mai
mare a bratului se pot folosi RP-3AH sau RP-5AH cu masa utila
3 kg si respectiv
5
kg, iar lungimea bratului de
335 kg si respectiv
453 kg.
2.2. Date tehnice:
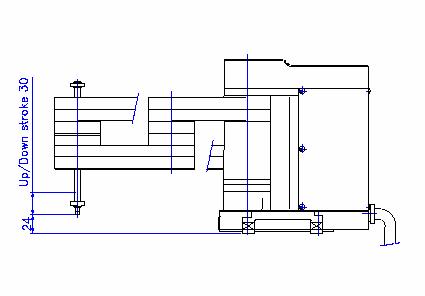
2.3. Spatiul de lucru la RP-1AH
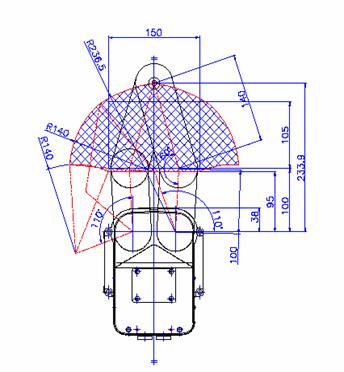
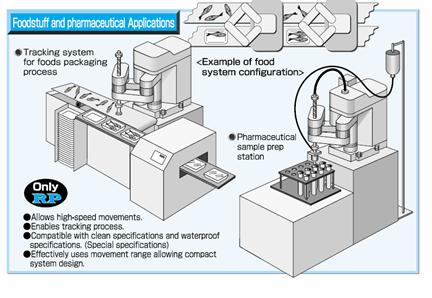
2.4. Domeniul de utilizare
Robotii Scara cu dublu brat sunt special
concepute pentru a manipula in spatii inguste piese de dimensiuni faoarte
mici cu precizie foarte mare ca de exemplu:
In industria farmaceutica si
alimentara fiind utilizate la dozare si prepararea produselor farmaceutice sau
la sortarea si ambalarea produselor alimentare.
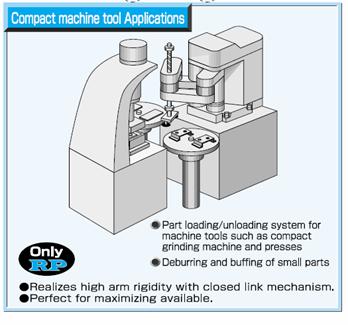
In industria constructoare de
masini la manipularea sculelor compacte
In aplcatii de antrenare
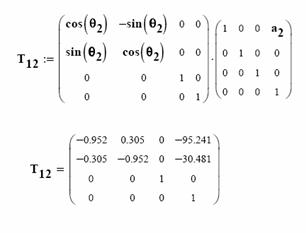
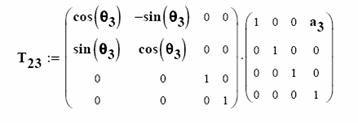
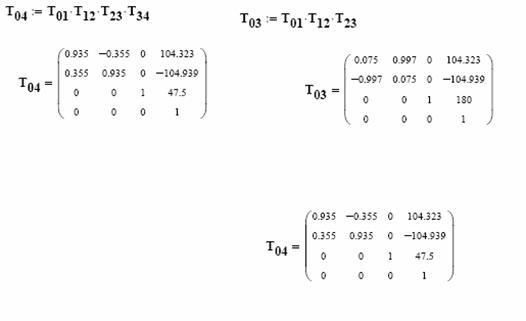
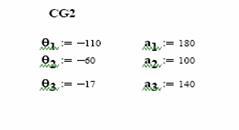
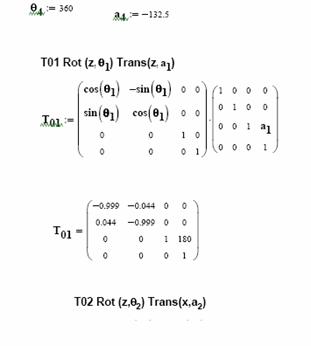
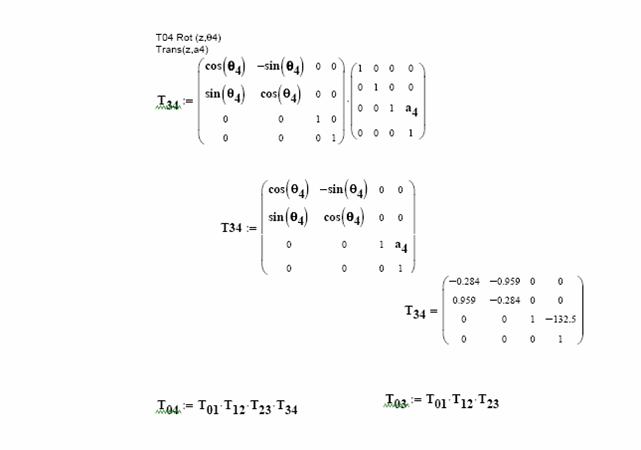
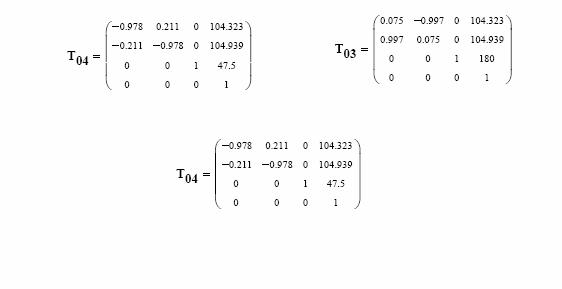
3. Memoriu de calcul
3.1. Schema cinematica
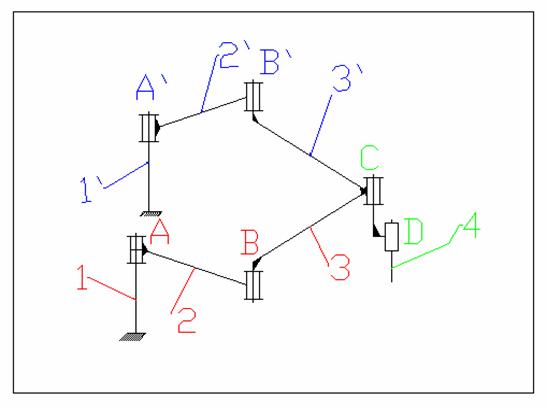

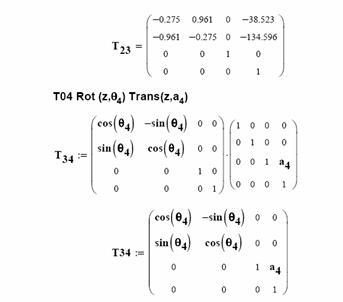
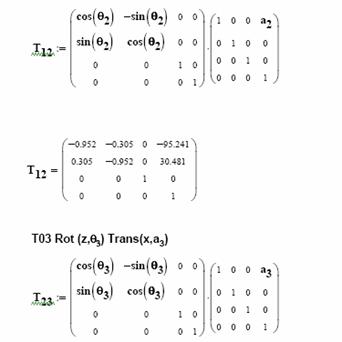
T02
Rot (z,q ) Trans(x,a
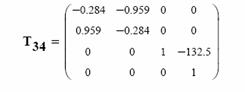
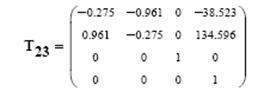
T03 Rot (z,q ) Trans(x,a
4. Memoriul de prezentare
4.1. Prezentare generala
In cadrul
acestei lucrari s-a realizat o celul de montaj
robotizata. Prin urmare, aceasta este
compusa din :
1. Un
robot SCARA cu dublu brat de tip RP-1AH
2. Un
sistem de transfer pe baza de palete care introduc, in sistem, PCB-ul
pe
care vin montate componentele electronice.
3. Trei alimentatoare cu banda care
introduc in sistem componentele
electronice.
Ansamblul
celulei d este prezentat in figura de mai jos.
4.2. Modul de functionare
In prima
faza robotul se afla in pozitia de Home asteptand in
formatia de la
senzori care confirma existenta PCB-ului in spatiul de asamblare. PCB este
fixat pe o palet care este adus in spatiul de asamblare
Deplasarea paletei este corelata cu deplasarea bandei cu componentele
electronice. Astfel, in momentul in care PCB-ul
intra in spatiul de asamblare
prima piesa este pregatita pentru montaj.
Dupa ce robotul a colectat toate
informatiile necesare se deplaseaza la locul
unde se afla piesa, ia piesa si apoi se
deplaseaza in spatiul de montaj,
pozitioneaza piesa dupa care o planteaza in PCB
5. NTS si PSI
5.1 Masuri de
siguranta
Masurile de siguranta pentru sistemele cu roboti
trebuie sa prevada pericolul la care se poate expune atat
utilizatorul, cat si robotul. De obicei, se utilizeaza senzori care
blocheaza miscarile robotului imediat ce acesta ajunge intr-un sector
periculos.Cateva exemple de instalatii de siguranta sunt date
mai jos:
Siguranta
robotului:
Limite
de zona impuse prin program (software);
Limite
de zona impuse prin senzori (hardware);
Opritori
mecanici.
Siguranta utilizatorului:
Covoare
(presuri) cu contacte electrice;
Grilaje
de protectie cu contacte electrice;
Bariere
cu senzori optici.
Siguranta utilizatorului si a
robotului:
Circuit
de Oprire de Urgenta;
Evitarea
coliziunilor.
5.2 Instalatii de
siguranta
Cateva instalatii tipice pentru
asigurarea sigurantei sunt:
Reducerea
puterii motoarelor in modurile de operare test si teach-in;
Limitarea
spatiului de lucru prin limitarea miscarilor articulatiilor cu
ajutorul opritorilor mecanici, a limitatoarelor cu contact electric sau prin
software;
Functionarea
robotului numai la apasarea unui buton cu revenire, ce
actioneaza un contact normal deschis,aflat pe panoul de comanda;
Functii
de tip Watch-Dog: Controller-ul stabileste anumite perioade de timp in
care trebuie sa execute anumite actiuni. Daca prin sistemul de
senzori, controller-ul detecteaza neindeplinirea uneia din aceste
actiuni, atunci deconecteaza motoarele de la alimentarea cu energie;
Verificarea
traiectoriei: In timpul programarii teach-in, se verifica daca
se poate parcurge orice punct de pe traiectoriile dorite (intre doua
puncte introduse de utilizator);
Testarea
pentru validare a datelor introduse de utilizator a.i. sa nu
depaseasca spatiul de lucru sau viteze maxime impuse;
Monitorizarea
miscarilor axelor: Diferenta dintre pozitia impusa si
pozitia reala trebuie sa fie cat mai mica. Daca motorul
de actionare este intarziat in reactie, atunci se poate modifica
traiectoria robotului. Acest lucru poate fi periculos si trebuie
semnalizat;
Teste de verificare a
senzorilor interni, ex.: encoder unghiular (de pozitie) si tahogeneratoare
(viteze):
verificarea
largimii de banda: Raportul dintre doua valori succesive ale
encoderului unghiular si timpul de ciclu nu trebuie sa
depaseasca viteza unghiulara maxima impusa.
Verificarea
directiei: Daca pozitionarea implica schimbarea sensului de
miscare a unei axe, aceasta schimbare trebuie sa aiba loc
intr-o perioada determinata de timp (intarziere mica).
Monitorizarea
pozitiei de repaus: In cazul unei pozitii care trebuie mentinuta
fixa, valoarea prelevata de la encorderul unghiular trebuie sa fie
constanta, iar valoarea tahogeneratorului trebuie sa fie aproximativ
zero.