Viteza de croaziera (economica) la automobile (cruise
control)
Introducere
1.1
Enuntul problemei
Se da un automobil
care are functia de cruise control inplementata, si se doreste studierea
problemei si a modelului matematic a acestei viteze de croaziera implementata.
Problema principala
este mentinerea la o viteza constanta a automobilului fara a deranja pasagerul.
Viteza de croarieza
este instabila in orice directie deoarece pe parcursul drumului pot interveni
tot felul de factori perturbatori, cum ar fi diverse denivelari ale drumului
cat si la pantele si rampele unor zone
deluroase .
Se cere :
Sa se determine modelele matematice de stare ale sistemului de cruise
control in cazurile :
Cand automobilul intampina
o panta mai mare de 4
unghiulare.
Cand se doreste accelerarea
voita si iesirea de modul cruise control.
Functiile de transfer si schemele bloc ale vitezei de croaziera .
Analiza in domeniul timp a sistemului utilizand
metode numerice (y(t)), u=1, u=sint, u=sin2t, u=sin20t.
Caracteristicile de frecventa, marginea de faza si de amplitudine.
Alegerea unor structuri clasice de reglare dupa eroare si studierea
diverselor controlere P, PI si PID.
Proiectarea unor controlere
PI si PID utilizand locul radacinilor.
2 Cerinte de proiectare
Sa se faca modelul matematic
Functiile de transfer a sistemului
Reglare dupa stare .
Proiectarea regulataorelor lead
,lag,lead-lag,pi,pd,pid.
Proiectarea unui regulator numeric prin metoda
reproiecatrii regulatorului dupa stare
prin
metoda reproiecatrii regulatorului dupa stare.
Regulator LQR
2. Determinarea modelului matematic.
Cruise control este
termenul folosit pentru a descrie un sistem de control care regleaza viteza
unui atutomobil. Cruise control pe plan comercial a fost introdus in anul 1958
ca o optiune pe Chrysler Imperial. Funcionarea de baza a unui operator de
viteza este de a seta viteza vehiculului, compara aceasta viteza la o setare
dorita de conducator, si apoi accelereaza sau decelereaza masina daca este
necesar. Figura de mai jos arata o schema bloc a unui sistem de
feedback.
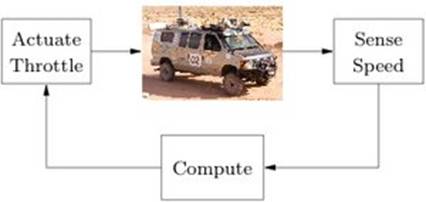
Un algoritm simplu
pentru controlul vitezei este acela de a utiliza o "proportionala plus-integral"
in feedback. In acest algoritm, vom alege
cantitatea de gaz care curge la motor bazat atat pe eroarea dintre viteza
actuala si dorita, cat si integrala acestei eroari.
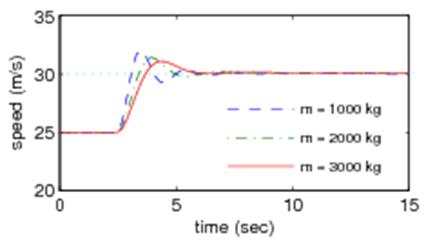
Figura
de mai jos arata rezultatele acestei feedback pentru o schimbare
radicala in viteza dorita si o varietate de mase diferite pentru
masina (care ar putea rezulta din cauza unui numar diferit de pasageri sau
din cauza tractarii unei remorci). Observati ca
independenta de masa (care variaza cu un factor de 3), viteza de
starea, de echilibru a vehiculului se apropie intotdeauna de viteza dorita
si atinge aceasta viteza in termen de aproximativ 5 secunde. Astfel,
performanta sistemului este robusta cu privire la aceasta
incertitudine.
Sistemul
de control de croaziera a unei masini este un sistem de feedback comun
care se intalneste in viata
de zi cu zi. Sistemul incearca sa mentina o viteza
constanta, in prezenta perturbatiilor
in principal, cauzate de schimbari in panta a unui drum. Controlerul
compenseaza pentru aceste necunoscute de
masurare, viteza masinii
si regleaza acceleratia corespunzator.
Pentru
modelul sistemului pe care il incepe cu diagrama bloc din Figura 2.1. Fie v viteza masinii si vr viteza dorita (de referinta). Controlerul,
care de obicei este de proportional integral
(PI), v
primeste semnale iar vr genereaza un semnal de comanda u care este trimis la mecanismul servomotorului care
controleaza pozitia pedalei de acceleratie. Acceleratia la
randul sau, controleaza cuplul T emis de motor, care este transmis prin
intermediul uneltelor si roti, generand o
forta F cu care se misca masina.
Exista forte perturbare Fd
datorita variatiilor in panta a
drumului, rezistenta la rulare si fortele aerodinamice.
Regulatorul
de croaziera are, de asemenea, o interfata om-masina,
care permite soferului
posibilitatea de a seta si modifica viteza dorita.
Exista, de asemenea, functii care deconecteaza
cruise control atunci cand frana este atinsa.
Sistemul
are multe componente individuale de actionare: motorul, transmisia,
rotile si caroseria ,iar un model detaliat poate
fi foarte complicat. In ciuda acestuia , modelul
necesar pentru a proiecta controlerul de croaziera poate fi destul de
simplu.
Pentru a dezvoltarea unui model matematic vom
incepe cu un echilibru in vigoare pentru caroseria masinii. Sa da v viteza masinii, m masa totala (inclusiv pasagerii), F forta generate de contact a rotilor cu drumul, si Fd forta perturbarea
datorita gravitatiei, frecare si rezistenta aerodinamica.
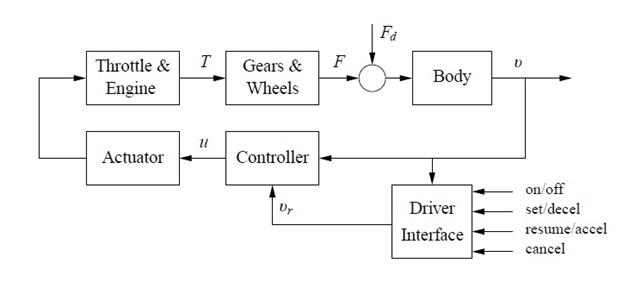
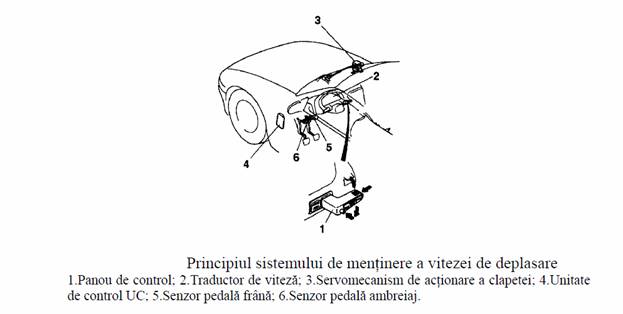
Figura 2.1
Schema
bloc a unui sistem de control de croaziera pentru un automobil. Supapele
controlate ale
motorului genereaza un cuplu T, care este transmisa la sol prin intermediul cutiei de
viteze
si a rotilor. Combinat cu fortele externe
de la mediu, cum ar fi fortele aerodinamice
si
fortele gravitationale pe dealuri, forta net face masina sa se
miste. Viteza
v a masinii este masurata
printr-un sistem de control care regleaza prin actionarea unui
mecanism de accelerare. O interfata driver
permite sistemului sa fie pornit si oprit, vr viteza de
referinta, care urmeaza sa fie
stabilite.
Ecuatia de
miscare a masinii este pur si simplu:
 (2.1)
(2.1)
Forta F este
generata de motor, a carui cuplu este proportional cu rata de
injectie a combustibilului, care este ea insasi
proportionala cu un semnal de control  care verifica pozitia pedalei de
acceleratie. Cuplul , de asemenea, depinde de ω. O reprezentare simpla a cuplului la acceleratia
completa este dat de curba cuplului
care verifica pozitia pedalei de
acceleratie. Cuplul , de asemenea, depinde de ω. O reprezentare simpla a cuplului la acceleratia
completa este dat de curba cuplului
 (2.2)
(2.2)
In cazul in care cuplul
maxim T m se obtine la ω m viteza motorului. Parametrii
tipici sunt T m = 190 Nm, ω m
= 420 rad / s (aproximativ 4000 rpm) si
Fie n
raport de transmisie si r raza
rotii. Turatia motorului este legata de viteza, prin expresia
si forta motorica
poate fi scrisa ca

Valorile tipice de α n pentru uneltele
de la 1 la 5 sunt si Inversul α n are o interpretare
fizica a razei rotii eficace. Figura 2.2 arata cuplul in functie
de viteza vehiculului. Figura arata ca efectul de viteze este de a
'aplatiza' curba de cuplu, astfel incat un cuplu aproape integral
poate fi obtinut aproape pe toata gama de viteze.
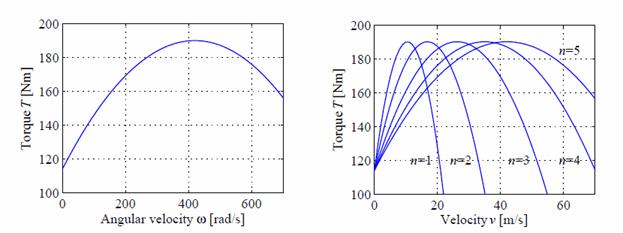
Figura 2.2
Curbele
cuplului motor alei masinii standarde. Graficul din stanga arata un cuplu
generat de motor in functie de viteza unghiulara
a motorului, in timp ce curba
pe dreapta arata cuplul ca o functie a vitezei
automobilului pentru diferite unelte.
Forta
de perturbare
Fd are trei
componente majore: F g ,
fortele datorita gravitatiei; F R ,
fortele din cauza frecarii de rulare ; si F a,
rezistenta aerodinamica. Inclinarea drumului formeaza o panta care
este θ , iar
gravitatia da F
g = sinθ m g, unde g = 9.8 m / s este
constanta gravitationala. Modelul detaliat este ilustrat in Figura
2.3
Un model simplu al
frecarii de rulare este:

unde C r este coeficientul de frecare a rotii si sng (v)
este semnul de v (±1) sau zero in cazul in
care v = 0. O valoare elementara pentru
coeficientul de frecare a rotii este C r
= 0,01. In cele din urma, glisarea aerodinamica este
proportionala cu patratul vitezei:
unde ρ este densitatea aerului, C
d este dependenta aerodinamica a coeficientul de rezistenta si A
este zona frontala a masinii. Parametrii tipici sunt 1,3 k / m , C d = 0,32 si A= 2.4 m
Adunanad, constatam
ca masinii i se poate atribui modelul:
 (2.3)
(2.3)
in cazul in care functia T
este data de ecuatia (2.2). Modelul (2.3) este un sistem dinamic
de ordinul intai.
Caracteristica
este viteza v a masinii, care este,
de asemenea iesire. Intrare
este semnalul u care controleaza
pozitia acceleratia, iar perturbatiile sunt Fd , care
depind de panta drumului. Sistemul este neliniar, deoarece forta cuplului in curba, fortele gravitationale si cele de
frecare a rotilor cat si fortele aerodinamice
au caracterul neliniar.
Pot fi,
de asemenea, variatii in parametrii standarzi, de exemplu, masa
masinii care depinde de numarul de pasageri si greutatile
transportate in masina.
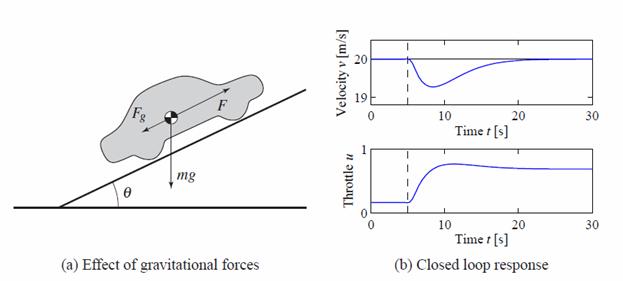
Figura
2.3
Masina
cu sistemul cruise control se confrunta cu un drum in panta. O
diagrama schematica este
prezentata in (a), si (b) care arata
raspunsul in viteza si acceleratie atunci cand o panta
de 4 ◦ este intalnita.
Panta este modelata cu o schimbare neta a unghiului cu 4 ◦, printr-o
schimbare liniara in
unghi dintre t =5 si t = 6. Regulatorului PI si se atribuie o
amplificre de kp = 0,5, iar
amplificarea integralaei
este
ki = 0,1.
Noi
adaugam la acest model un controler de feedback care incearca
sa reglementeze viteza din
masina in prezenta perturbatiilor. Vom folosi un
proportional-integral controler, care are forma:
Acest
controler se poate realiza ca o intrare/iesire in acest sistem dinamic,
prin definirea
unei caracteristici controlerului z si punerea in aplicare a ecuatiei diferentiale
 (2.4)
(2.4)
in cazul in care vr este viteza dorit (de
referinta). Dupa cum s-a discutat anterior
integratorul (reprezentata de caracteristica z) asigura ca, in starea de
echilibru, eroarea va fi dusa spre zero, chiar
si atunci cand exista tulburari sau erori de modelare.
Figura
2.3b. arata raspunsul sistemului cu circuit inchis, format din ecuatiile (2.3)
si (2.4), cand intalneste un deal.
Figura arata ca, chiar daca este un deal atat de abrupt, crouise
control aplica modificari acceleratiei de 0.17
reusind sa redea viteza dorita, eroarea fiind mare, viteza este mai mica
de 1 m / s, insa chiar si asa, viteza este
recuperata dupa 20 s.
Multe aproximari
s-au facut atunci cand derivam modelul
(2.3). Aceasta
poate parea surprinzator
prin faptul ca un astfel de sistem aparent complicat poate fi descris
printr-un simplu model (2.3). Modelul nu este
valabil pentru schimbari foarte rapide a
pedalei de acceleratie pentru ca am ignorat detalii dinamice ale
motorului, nici nu este valabil pentru schimbari foarte lente, deoarece
proprietatile motorului se va schimba
peste ani. Cu toate acestea, modelul este foarte util pentru proiectarea unui sistem de control de croaziera.
Sistemul
de control de croaziera, de asemenea, are o interfata
om-masina care permite
comunicarea cu sistemul dispozitivului. Exista multe
posibilitati de a se pune in aplicare
acest sistem, o versiune este ilustrata in Figura
2.4.
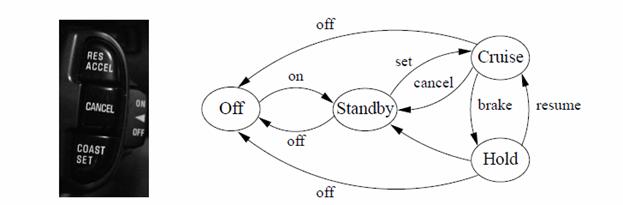
Figura
2.4
Sistemul
de baza la o masina pentru control de croaziera. Figura din stanga
arata
unele butoane standard folosite pentru a controla
sistemul. Regulatorul poate fi intr-una din cele patru moduri, corespunzatoare nodurilor din diagrama din dreapta.
Tranzitia intre modurile de transport poate fi controlata prin apasarea unuia din cele cinci butoane de pe
interfata de control de croaziera: pornit, oprit, set, relua sau anula.
Sistemul
are patru butoane: on-off,
set / scade, reia / accelera si de a anula. Functionarea sistemului
este guvernata de un automat finit care controleaza
modurile de controler PI si generator de
referinta.
Utilizarea
controerului in sistemele automobilelor este utilizata dincolo de simplu
sistem de viteza de croaziera descris aici. Cererile
includ emisii de control, de tractiune control,
control al puterii (in special in vehiculele hibride) si control de
croaziera adaptabile.
SIMULINK model
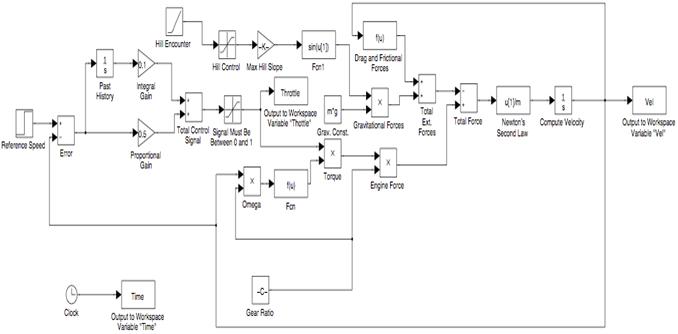
Programul in matlab:
% cruisedyn - dynamic model for cruise control example
% Usage: acc = cruisedyn(v,
u, gear, theta, m)
% This function returns the
acceleration of the vehicle given the
% current velocity (in m/s), throttle setting (0 <=
u <= 1), gear (1-5),
% road slope (default 0) and car mass (default 1000
kg).
% RMM, 2 Jul 06
function dv = cruisedyn(v, u, gear, theta, m)
% Check the parameters to make sure that they are OK
% MISSING
% Parameters for defining the system dynamics
alpha % gear ratios
Tm = 190; %
engine torque constant, Nm
wm %
peak torque rate, rad/sec
beta %
torque coefficient
Cr = 0.01; %
coefficient of rolling friction
rho %
density of air, kg/m^3
Cd = 0.32; %
drag coefficient
A = 2.4; %
car area, m^2
g = 9.8; %
gravitational constant
% Set defaults if all arguments aren't passed
if (nargin < 3) gear = 1; end; % gear ratio
if (nargin < 4) theta = 0; end; % road angle
if (nargin < 5) m = 1000; end; % mass of the car
% Check to make sure arguments are
reasonable
if (gear < 1 || gear > 5)
fprintf(2, 'cruisedyn: gear ratio out of range');
acc = 0; return;
end
if (theta < -pi/4 || theta > pi/4)
fprintf(2, 'cruisedyn: road slope out of rangen');
acc = 0; return;
end
if (m < 500 || m > 10000)
fprintf(2, 'cruisedyn: vehicle mass out of rangen');
acc = 0; return;
end
% Saturate the input to the range of 0 to 1
u = min(u, 1); u = max(0, u);
% Compute the torque produced by the engine, Tm
omega = alpha(gear) * v; %
engine speed
torque = u * Tm * ( 1 - beta *
(omega/wm - 1)^2 );
F = alpha(gear) * torque;
% Check to make sure engine settings are reasonable
if (omega > 700)
fprintf(2, 'cruisedyn: engine rpm too high (%g)n',
omega*30/pi);
end
if (torque < 0)
fprintf(2, 'cruisedyn: torque is negative (u=%g,
omega=%g)n', u, omega);
end
% Compute the external forces on the vehicle
Fr = m * g * Cr; %
Rolling friction
Fa = 0.5 * rho * Cd * A * v^2; % Aerodynamic drag
Fg = m * g * sin(theta); % Road slope force
Fd = Fr + Fa + Fg; %
total deceleration
% Now compute the
acceleration
dv = (F - Fd) / m;
Bibliografie:
"MECATRONICA AUTOMOBILELOR" -Conf.
dr. ing. Florin SERNAN
www.wikipedia.com
curs ISA - Conf. dr. ing. Viorel Dugan


