Funcționarea SRA cu
elemente de execuție pneumatice - succesiunea fazelor procesului
automatizat
 Automatica cuprinde totalitatea metodelor si a mijloacelor
tehnice prin care se stabilesc legaturi corespunzatoare intre
instalatiile tehnologice, dispozitive anume introduse, astfel incat
conducerea proceselor de productie sa se desfasoare fara
interventia directa a omului.
Automatica cuprinde totalitatea metodelor si a mijloacelor
tehnice prin care se stabilesc legaturi corespunzatoare intre
instalatiile tehnologice, dispozitive anume introduse, astfel incat
conducerea proceselor de productie sa se desfasoare fara
interventia directa a omului.
Principalele
avantaje ale automatizarii constau in:
cresterea
productivitatii muncii;
imbunatatirea
calitatii muncii;
reducerea efortului
intelectual depus de oameni in cadrul procesului de productie.
In structura oricarei instalatii automatizate se disting:
instalatia tehnologica, dispozitivul de automatizare.
Automatizarea proceselor de productie se realizeaza prin sisteme
automate, formate din elemente componente, care se realizeaza in schemele functionale, simbolizate
printr-un dreptunghi (fig.1).
Prin Sistem de Reglare Automata (SRA) se intelege un
sistem realizat astfel incat intre marimea de iesire si
marimea de intrare se realizeaza automat, fara
interventia omului, o relatie functionala care
reflecta legea de conducere a unui proces.
Elementul
de comparatie (EC) are rolul de a compara permanent
marimea de iesire a instalatiei tehnologice cu o marime de
acelasi fel cu valoare prescrisa (considerata constanta),
rezultatul comparatiei fiind semnalul de eroare
Regulatorul
automat (RA) are rolul de a efectua anumite operatii asupra
marimii primita la intrare, respectiv are rolul de a prelucra aceasta
marime dupa o anumita lege, numita lege de reglare,
rezultatul fiind marimea Xc aplicata ca marime de comanda
elementului de executie.
Elementul
de executie (EE) are rolul de a interveni in
functionarea instalatiei tehnologice pentru corectarea parametrilor
reglati conform marimii de comanda transmise de RA.
Instalatia
tehnologica (IT) este in cazul general un sistem
supus unor actiuni externe numite perturbatii si actiunii
comenzii generate de RA a carui marime de iesire este astfel
reglata conform unui program prescris.
Traductorul
(Tr) este instalat pe bucla de reactie negativa
are rolul de a transforma marimea de iesire a IT de regula
intr-un semnal electric aplicat EC.

Fig.1. Modelul structural al unui sistem de reglare
automata
Elementele componente ale schemei unui SRA:
E.C. - element de
comparatie;
R.A. - regulator automat;
E.E. - element de executie;
I.T. - instalatie
tehnologica;
Tr - traductor.
Marimi care intervin in schema de elemente a unui SRA:
U - marime de intrare a sistemului;
- semnalul de eroare;
Yr - marime de reactie;
Xc - marimea de iesire a regulatorului
automat;
Xm - marime de
intrare a instalatiei tehnologice;
Y - marime de iesire a sistemului (a
instalatiei tehnologice);
P - perturbari.
Elementele de executie
sunt componente ale sistemelor automate care primesc la intrare semnale de
mica putere de la blocul de conducere si furnizeaza marimi
de iesire, in marea majoritate a cazurilor, de natura mecanica
(forte, cupluri) capabile sa modifice starea procesului in
conformitate cu algoritmul de conducere stabilit.
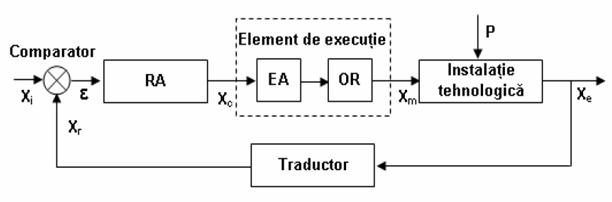
Fig.2.
Schema bloc a unui SRA
Elementul de executie este
format din doua parti distincte: motorul de executie (ME) sau
element de acționare (EA) si organul de executie (OE) sau organ
de reglare (OR).
Elementul de actionare are rolul de a transforma semnalul de comanda, primit de regulator intr-un
cuplu de forta cu care actioneaza asupra organului de
reglare.
Organul de reglare este elementul care intervine in instalatia tehnologica, modificand
sub actiunea fortei sau cuplului
generat de servomotor,
cantitatile de material sau
energie necesare procesului.
Marimea de iesire a organului de reglare este, de regula,
sub forma unei deplasari liniare sau unghiulare.
Relatia care se stabileste intre marimile m de la
iesirea elementului de executie (EE) (marimea de executie)
si c marimea de intrare a EE (provenita de la regulator)
defineste comportarea EE in regim stationar. Raportul dintre aceste
marimi, pentru orice valoare a lui c, ar fi ideal sa fie constant,
dar intervin in cursul functionarii EE anumiti factori care
influenteaza marimea m (frecari, reactii ale mediului
ambiant, greutati neechilibrate etc.).
Exista
cazuri cand trecerea de la regulator la
EE trebuie adaptata, folosind un convertor care
transforma marimea de comanda, de exemplu din electrica in
hidraulica, daca intrarea in EE trebuie sa fie hidraulica. EE
poate actiona asupra modificarii de energie in doua moduri:
Continuu, daca marimea m poate lua orice
valoare cuprinsa intre doua valori limita;
Discontinuu, daca
marimea m poate fi modificata numai pentru doua valori
limita (dintre care cea inferioara este in general zero
Actionarea electrica a organelor de executie se
realizeaza cu electromagneti sau cu motoare electrice de curent
continuu sau de curent alternativ.
Elementele de executie pneumatice cu membrana
transforma energia potentiala a aerului sub presiune in energia
mecanica la deplasarea liniara a unui organ de executie cu care
se face interventia in procesul automat.
Alimentarea elementelor de executie pneumatice se
face cu energie de la regulatoarele pneumatice (0.2 ÷ 1 bar), sau electronice,
prin intermediul convertorului electro-pneumatic.
Elementele
de execuție pneumatice sunt formate din motor de execuție (SP -
servomotorul pneumatic) și organul de execuție (OE) ( fig.3).
|
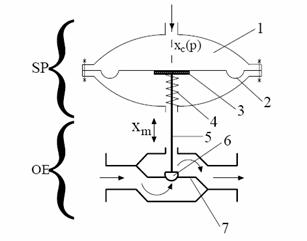
|
camera
membrana
elastica
disc metalic de rigidizare
arc
tija
supapa
robinet
|
|
Fig.3. Element de executie pneumatic cu membrana
si resort
|
|
Marimea de intrare xc este o presiune
care provine de la un regulator sau un convertor și are ca marime de
ieșire deplasarea xm a tijei robinetului. Supapa 6
realizeaza inchiderea robinetului in funcție de deplasarea axului 5.
Aceasta inchidere depinde și de profilul supapei.
Motoarele de
executie pneumatice se folosesc foarte mult pentru ca prezinta
urmatoarele avantaje:
Fluidul folosit (aerul) nu prezinta pericol de incendiu;
Dupa utilizare, aerul este evacuat in atmosfera, nefiind necesare
conducte de intoarcere ca la cele hidraulice;
Pierderile de aer in anumite limite, datorate
neetansietatii, nu produc deranjamente;
Sunt simple, robuste,
sigure in functionare si necesita cheltuieli de intretinere
reduse.
Dezavantajele acestor motoare sunt urmatoarele:
Viteza de raspuns este mica (in medie 1/3 - 1/4 din viteza de raspuns a motoarelor
hidraulice);
Precizia motoarelor
pneumatice este redusa.
Se recomanda
folosirea servomotoarelor pneumatice in cazurile cand: servomotorul are
greutate redusa, temperatura mediului ambiant este ridicata;
Mediul ambiant este
exploziv;
Nu se cer viteze de lucru mari.
Motoarele pneumatice pot
fi liniare sau rotative. Cele liniare se pot realiza
cu piston sau cu membrana.
Structura complexa, a unui element de executie
pneumatic se compune din: 1
servomotor pneumatic; 2 amplificator pneumatic; 3 traductor de
pozitie; 4 element sensibil; 5 organ de executie (fig. 4).
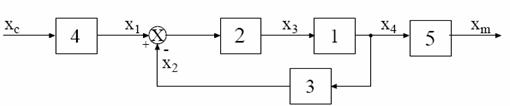
Fig.4. Structura unui
element de executie pneumatic
In figura 5 este prezentata schema de reglare automata a
debitului de fluid printr-un robinet cu ajutorul unui element de execuție
pneumatic cu membrana (in figura nu s-a mai desenat și corpul
robinetului). Resortul 6 și axa x a robinetului constituie in acest sistem
procesul reglat P. Elementul de
masurare (traductorul) pentru
marimea reglata x este format din parghia 1 și resortul 2.
Marimea de intrare in sistem este c.
Elementul de comparație este format din extremitatea libera a
burdufului 3. Asupra burdufului acționeaza pe de o parte o forța
Sbc, in care Sb este suprafața burdufului, iar pe de
alta parte forța resortului 2 proporționala cu deplasarea
x. Deplasarea clapetei 4 in fața ajustajului 5 va fi
proporționala cu c - x (marimea de eroare). In acest sistem
regulatorul, constituit din amplificatorul A, este de tip proporțional
și este alimentat cu aer comprimat la o presiune Pa. Presiunea
p de la ieșirea din amplificator este marimea de comanda, iar
marimea de execuție este Sp, in care S este suprafața utila
a diafragmei.
Marimea de ieșire a acestui sistem este x care tinde sa
devina egala cu c. Datorita faptului ca regulatorul este de
tip proporțional va apare o abatere staționara care depinde de
amploarea marimilor de perturbație care acționeaza asupra
axului pistonului. Abaterea staționara poate fi neglijata chiar
in cazul unor limite foarte largi ale perturbațiilor care apar in procesul
de reglare in care s-a introdus un robinet cu poziționer (supapa).
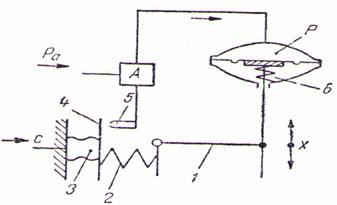
Fig.5. Reglarea
automata cu element de execuție pneumatic
Schema
bloc a reglarii cu element de execuție pneumatic este prezentata
in figura 6.
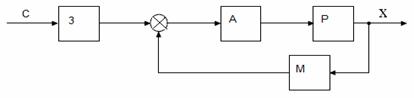
Fig.6. Schema bloc a reglarii
Dintre aceste elemente, amplificatorul de putere,
elementul sensibil si traductorul de pozitie, care sunt atasate
servomotului pneumatic, formeaza pozitionerul. Pentru a fi studiata comportarea elementului
de executie in ansamblul sistemului de reglare este necesar sa se
stabileasca relatia ce leaga marimea Xm de
marimea Xc (pentru elementul de executie pneumatic cu
membrana, Xc este o presiune). Elementele
de actionare pneumatica se construiesc in doua variante: cu
membrana si cu piston. Dupa cum aerul sub presiune poate sa
actioneze pe o singura fata sau pe ambele fete ale
membranei elastice, deosebim elemente de executie proportionale sau
integrale.
La cresterea presiunii de comanda (pc)
va creste presiunea in camera (1), dar in acelasi timp are loc
si o variatie de volum a acestei incinte dupa o relatie de
forma:

Schema pneumatica este reprezentarea grafica a instalației pneumatice
care echipeaza o masina oarecare cu are rolul de a facilita ințelegerea
funcționarii din punct de vedere pneumatic.
Schema pneumatica
poate fi privita ca o structura formata din 5 nivele
(figura), fiecare etaj conținand o anumita categorie de elemente
pneumatice.
1)
Elementele ce asigura alimentarea
instalației cu energie pneumatica la parametrii ceruți de
sistem: presiune, debit, filtrare, ungere.
2)
Elementele de comanda permit dialogul om-masina: comenzi de
pornire-oprire, selectare pentru diferite funcții sau moduri de lucru. Aceste
elemente sunt grupate intr-un panou de comanda, separat sau lipit de
instalației.
3)
Elementele de procesare: asigura procesarea (interpretarea și distribuirea)
semnalelor primite in instalație: atat a celor de comanda, provenite
de la tabloul de comanda, cat și a celor de reacție, care sunt
de obicei semnale ce ofera informații despre starea mașinii
și / sau a procesului tehnologic desfașurat. Ele
prelucreaza semnalele fie unitar, fie in anumite combinații, realizand
diferite funcții logice: DA, NU, SI, SAU, NON SI, temporizare,
memorie, etc.
4)
Elementele de comanda finala: sunt echipamente de distribuție a
energiei pneumatice și reprezinta etajul din care semnalele de
comanda sunt injectate direct elementelor de execuție: motoare liniare,
rotative, oscilante, unitați de vidare, manipulatoare.
5)
Elementele de execuție (actuatoarele) echipamente care convertesc energia
de presiune a agentului de lucru in energie mecanica pentru efectuarea de
lucru mecanic.
Sugestii metodologice:
UNDE PREDAM?
Continutul
poate fi predat in laborator sau intr-o sala dotata cu calculator
și videoproiector.
CUM
PREDAM?
Se
poate utiliza: videoproiectorul, retroproiectorul, simulari pe
echipamente, PC-uri și A.P.
Se recomanda utilizarea fiselor de lucru pentru elevi la
activitatile de fixare a noilor cunostinte.
Prezentarea conținuturilor se poate face prin expunere, conversatie euristica, problematizare,
demonstrație, observatie
dirijata etc.
Se recomanda efectuarea de lucrari de
laborator pentru determinarea succesiunii fazelor procesului automatizat.
ORGANIZAREA
CLASEI:
Clasa poate fi organizata frontal sau pe grupe de
2 - 6 elevi, in functie de nivelul clasei.
EVALUAREA
CUNOSTINTELOR:
 Evaluarea se poate realiza prin fise de evaluare individuale in care
elevul sa determine succesiunea fazelor unui proces automatizat.
Evaluarea se poate realiza prin fise de evaluare individuale in care
elevul sa determine succesiunea fazelor unui proces automatizat.

