Monitorizarea parametrilor curentilor acvatici
Monitorizarea reprezinta observarea si inregistrarea
regulata a unor parametri fizico-chimici. Acest proces presupune
colectarea datelor in mod repetat, dupa un algoritm specific vitezei de variatie
a parametrului si scopului urmarit.
In urma monitorizarii curentilor se pot desena harti
ale curentilor acvatici in functie de anotimp, cum ar fi vara/iarna
sau in functie de zi/noapte.
1. Curentmetru
Aparatul este destinat masurarii vitezei
si directiei curentilor marini, pana la adancimea de 200m. Citirea
rezultatelor masurarilor se face pe un aparat cu afisare
numerica aflat la bordul navei.
1.1. Caracteristicile tehnice ale
curentmetrului proiectat si fabricat de Institutul G. Antipa
Caracteristicile
curentmetrului sunt urmatoarele:
curentometrul: pupitrul de afisare: indica viteza
si directia:
- masurarea
vitezei curentului: -
curentului: digital pe 3 digiti;
traductor: rotor vertical cu 3 pale; - gabarit:
domeniul de masurare: 2 200 cm/s;
curentometru: Ø140x440 mm fara
viteza de demarare: 2 cm/s; garda si ampenaj de directie;
-
masurarea directiei curentului: -
pupitru: 225x90x260 mm;
traductor: compas magnetic - corp
curentometru orientabil in curent; - curentometru: 12 daN;
-
domeniul de masurare: 00 - 3600; - pupitru: 3,5 daN;
-
viteza de asezare in curent: 2 cm/s; -
alimentare: 24 Vcc/220 Vca;
directii indicate: 64; - adancimea
maxima de lucru: 200 m.
1.2. Date tehnice
Functional, aparatul este constituit din
doua lanturi de masura, unul destinat masurarii
vitezei iar celalalt directiei curentului, afisarea rezultatelor
masurarii se face pe un afisor comun (Fig. 2).
1. Masurarea
vitezei si directiei
Pentru masurarea vitezei se utilizeaza un
traductor de viteza (TV) cu rotor Savonius. In
traductorul de viteza conversia miscarii de rotatie in
semnal electric se face cu un senzor optoelectronic, prin reflexie pe
suprafata superioara a rotorului. Miscarea rotorului de viteza este
influentata, in aceasta varianta de functionare, numai
de frecarea axului in lagare.
Viteza curentului este convertita in impulsuri de
tensiune de amplitudine constanta si frecventa
proportionala cu viteza curentului. Impulsurile sunt numarate
iar rezultatul masurarii, transformat in cm/sec, este citit pe un
afisaj numeric (FN).
Masurarea directiei se face prin conversia
unghiului de rotatie al traductorului de directie, antrenat de curent,
fata de o directie de referinta. Conversia se face
folosind ca referinta un compas magnetic pe axul caruia este
fixat un disc codat in cod Gray care realizeaza transformarea unghiului de
rotatie a traductorului intr-un cuvant de 6 biti. Traductorul de
directie (TD) este corpul curentometrului care se orienteaza in
curent.
Solidar cu acesta se afla un sistem de cuplaj
optoelectronic obturat de discul codat fixat pe axul compasului magnetic. Prin
folosirea unui cuvant de 6 biti, treapta de conversie a fost
stabilita la 5 . Campul de 360 a fost divizat in 64 sectoare egale. S-a adoptat aceasta metoda de masurare
din urmatoarele considerente:
- se exclude orice frecare mecanica intre
partile aflate in miscare una fata de cealalta, exceptand
frecarea axului compasului magnetic in lagare;
- eroarea de masura este constanta
si cunoscuta; ea poate fi redusa la valoarea treptei de
cuantizare prin realizarea unei constructii mecanice ingrijite.
Treapta de cuantizare poate fi micsorata
prin marirea lungimii cuvantului de cod folosit la conversie la 7
biti ceea ce corespunde la 128 directii - deci la o treapta de
conversie de 2 , sau chiar la 8 biti ceea ce ar corespunde la o
treapta de conversie de cca 1° 24 . Aceasta treapta de conversie nu se
justifica deoarece directia de referinta furnizata de
compasul magnetic are o eroare de indicare datorata frecarilor
si imperfectiunii constructiei mecanice de cca 2°, adica de
doua ori mai mare decat treapta de conversie.
1.4. Afisarea
rezultatului
Afisarea rezultatului masurarii
directiei curentului se realizeaza astfel, cuvantul in cod Gray este
transformat intr-un convertor de cod (G/B), in cod binar natural si
introdus intr-un convertor digital - analog (DAC08). La iesirea
convertorului se obtine o tensiune continua, proportionala
cu directia curentului, care este transformata cu ajutorul unui
convertor (U/F) in frecventa si transmisa la
suprafata pentru a fi afisata. S-a adoptat acesta
solutie tehnica de transmitere a marimii masurate pentru
urmatoarele avantaje:
- transmisia se face pe un singur conductor;
- informatia nu este alterata de
perturbatii, paraziti etc;
- afisarea se face cu ajutorul frecventmetrului
numeric (FN) folosit si pentru afisarea vitezei curentului.
Aceasta solutie permite utilizarea ca suport
de transmitere a informatiei de viteza si directie a unui
cablu cu 4 conductoare, unu pentru viteza, unu pentru directie
si doua pentru alimentare cu energie electrica.
Constructiv, aparatul se
compune din doua parti distincte, figura 3:
- sonda (6) care
contine traductoarele de viteza si directie si
circuitele de conversie si masura;
- aparatul de la
suprafata (1) care contine sursa de tensiune pentru alimentarea
sondei si un frecventmetru pentru afisare.
Sonda (6) este o
constructie navalizata, etansa si rezistenta la
presiunea ambianta.
Carcasa sondei asigura
o incinta uscata circuitelor de conversie si masura
si traductorului de directie. Etansarile sunt fixe, cu
garnituri de cauciuc. Capacul superior are fixat un conector etans (5) pentru
cablul sondei si sistemul mecanic cu vartej (4) de suspendare a sondei. Capacul inferior are o trecere etansa pentru
senzorul de viteza (7) si are fixat, in centru, lagarul superior
al rotorului de viteza.
Pentru orientarea in
curent pala de directie (2) se fixeaza pe corpul sondei (6).
Traductorul de
directie se compune din doua parti: un compas magnetic care
mentine directia nord si o pala de directie care se
orienteaza in curent si este solidara cu carcasa.
Discul codat este fixat pe axul compasului
magnetic si reprezinta partea din traductor care furnizeaza
directia de referinta nord.
Senzorul optoelectronic al traductorului de
directie este solidar cu carcasa orientabila in curent si
furnizeaza sub forma unui cuvant de 6 biti in cod Gray unghiul
fata de directia nord.
Pentru pastrarea
pozitiei verticale in functionare, compasul magnetic este fixat in
carcasa pe un cadru cu articulatie cardanica care ii
asigura o inclinare de 30° fata de carcasa.
Traductorul de viteza
se compune din rotor Savonius cu flotabilitate nula si un sistem
optoelectronic pentru conversia miscarii de rotatie in impulsuri
de tensiune.
La inclinari mai mari
de 15 eroarea de masurare a traductorului de viteza
devine considerabila. Pentru limitarea inclinarii, daca este
necesar, carcasa este lestata.
Componentele din interiorul
sondei sunt fixate pe un cadru demontabil care permite scoaterea
usoara in vederea depanarii si intretinerii periodice.
Aparatul poate fi utilizat
pe nave de cercetare sau pe ambarcatiuni usoare care executa
masurari de curenti in mare, lacuri naturale, lacuri de
acumulare la hidrocentrale, etc. Acesta poate fi utilizat independent sau in
combinatie cu alte aparate pentru masurari subacvatice.
2. Sisteme bazate pe effect DOPPLER
2.1.
Efectul DOPPLER
Efectul Doppler consta in
variatia frecventei unei unde emise de o
sursa de oscilatii, daca aceasta se afla in miscare
fata de receptor. Efectul Doppler poate fi constatat atat in cazul
undelor electromagnetice (inclusiv lumina), cat
si in cazul undelor elastice (inclusiv sunetul). Frecventa
masurata creste atunci cand sursa se apropie de receptor si
scade cand susrsa se departeaza de receptor.
Unda
emisa de o sursa de oscilatii se propaga de la sursa
pana la receptorul care o detecteaza. Prin detectarea undei se
intelege masurarea unei anumite marimi caracteristice ei, de
exemplu, frecventa undei. Daca sursa si receptorul sunt in
repaus unul fata de celalalt, frecventa undei masurata
de receptor este egala cu frecventa undei emisa de sursa. Asa
se intampla atat cu undele sonore cat si cu cele luminoase. Daca
insa sursa de oscilatii este in miscare fata de receptor, frecventa
undei masurata de receptor difera de aceea a undei emisa de
sursa de oscilatii. Acest fapt care se observa cand sursa si
receptorul sunt in miscare unul fata de celalalt, se
numeste efectul Doppler; acest efect este foarte important atat in
stiinta cat si in tehnica.
Figura 4
- Imagine a
fronturilor de unda emise de o sursa in miscare (de la dreapta
la stanga) fata de mediul in care se propaga undele un
observator aflat in fata sursei va percepe unde cu frecventa mai
ridicata decat unul aflat in spatele sursei
Explicatia efectului Doppler se
va face folosind figura 4. care reda undele sferice ce izvorasc din
sursa de oscilatii. Daca sursa se misca, undele sferice
emise succesiv, se apropie unele de altele in sensul de miscare al sursei.
Distanta dintre suprafetele sferice de egala faza
reprezinta lungimea de unda; se observa astfel ca la receptorul
stationar, ajung in unitatea de timp, unde cu suprafetele sferice mai
apropiate intre ele in comparatie cu situatia in care sursa ar fi in
repaus fata de receptor. Intrucat suprafetele de egala
faza sunt aparent mai apropiate, lungimea de unda aparenta la este
mai mica si deci frecventa undelor masurata de receptor
este in acest caz mai mare. Daca sursa este stationara, iar
receptorul se deplaseaza catre sursa, acesta intalneste in
unitatea de timp mai multe unde sferice, decat daca receptorul ar fi fost
fix si undele ar fi ajuns la el. Ca urmare receptorul in miscare
catre sursa detecteaza o frecventa mai mare.
In
consecinta, frecventa detectata de receptor creste
daca miscarea relativa a sursei fata de receptor, printr-un
rationament analog cu acela facut mai inainte, se ajunge la concluzia
ca frecventa masurata de receptor scade. Daca sursa
sta pe loc iar receptorul se deplaseaza, de la dreapta spre stanga, departandu-se
de sursa, undele sferice ajung la receptor mai rar in timp, decat
daca receptorul ar fi fost in repaus si deci acesta detecteaza o
frecventa mai mica. Prin urmare, frecventa detectata scade,
daca miscarea relativa a sursei fata de receptor ii
departeaza pe unul de celalalt.
Pentru a exprima cantitativ
modificarea frecventei in efectul Doppler se noteaza cu "u" viteza de
deplasare a sursei fata de receptor, cu "nS"
frecventa undelor emise de sursa si cu "nR" frecventa
undelor masurate de receptor. Undele studiate se propaga cu viteza "v"
in mediul in care se gasesc sursa si receptorul; aceasta
viteza fiind o caracteristica a mediului respectiv nu este
afectata de miscarea sursei sau a receptorului.
In timpul "t" sursa emite nS∙t
si, daca sursa ar fi fixa, aceste unde ar parcurge distanta
v∙t. Lungimea de unda se obtine ca raportul intre distanta
v∙t parcursa si numarul de unde care acopera
aceasta distanta.
Daca sursa se deplaseaza
catre receptor cele nS∙t
unde emise de sursa se vor raspandi intr-un spatiu mai mic decat v∙t,
deoarece in timpul t sursa insasi s-a deplasat cu distanta u∙t.
Aceasta inseamna ca numarul de unde nS∙t
emise de sursa in timpul t se vor gasi in spatiul v∙t-u∙t
, iar lungimea de unda aparenta, definita ca raportul intre
spatiul v∙t-u∙t si numarul de unde nS∙t
este frecventa corespunzatoare lungimii de unda la si
este frecventa masurata de receptor nR
Efectul Doppler este foarte
important in astronomie unde prin masurarea frecventei
radiatiilor care provin de la stele sau galaxii indepartate se poate
stabili miscarea acestora fata de planeta noastra. Prin
astfel de masuratori se obtine intotdeauna o frecventa
mai mica a radiatiilor luminoase caracteristice astrilor
respectivi. Aceasta inseamna ca lungimea de unda
masurata este mai mare decat cea reala; cu alte cuvinte are loc o
deplasare spre "rosu" a radiatiilor luminoase respective. Lumina
rosie avand lungimea de unda cea mai mare in domeniul vizibil. Valoarea
variatiei frecventei creste cu distanta de la Pamant, ceea
ce sugereaza ca intregul Univers este in expansiune, adica
toti astrii se indeparteaza spre limitele Universului, cu
viteze din ce in ce mai mari pe masura ce sunt mai
departati de Pamant. Aceasta este o problema majora a
cosmologiei si studiul ei se bazeaza in principal pe efectul Doppler.
Viteza sunetului in diverse medii
Moleculele de aer au
tendinta de a se misca mai usor prin medii calde si umede
datorita faptului ca in aceste conditii energia lor interna
creste. Cum viteza sunetului depinde de felul in care variaza
presiunea aerului atunci cand moleculele se ciocnesc unele de altele (creand
zone de compresie, dar si zone cu aer mai rarefiat), elasticitatea
moleculelor devine un factor important. De aceea, in zilele calduroase
si cu umiditate ridicata, sunetul calatoreste mai
repede decat intr-o zi rece si uscata, atunci cand moleculele de aer
nu oscileaza cu aceeasi usurinta.
Exista o formula cu
care putem determina viteza de propagare a sunetului prin aer, tinand cont
si de temperatura de afara:
Viteza
sunetului = 331 m/s + 0,60 (numarul de grade peste 00C).
Deci viteza sunetului creste
cu 0,6 m/s la ridicarea temperaturii cu un grad Celsius, ea avand valoarea de
331 m/s la temperatura de inghet a apei, 00C.
In jurul anului 1660, omul de
stiinta englez Robert Boyle a dovedit faptul ca undele sonore au nevoie de un mediu prin
care sa se propage pentru a transmite sunetele la
distanta. Altfel spus, in
vid sunetele nu se propaga. Boyle a folosit un clopotel plasat
intr-o incinta inchisa si etansa din care aerul putea
fi scos treptat. A observat ca pe masura ce aerul
paraseste incinta respectiv, sunetul scos de clopotel
devine din ce in ce mai slab, pana la atenuarea totala.
Newton a avut si
el contributia sa la intelegerea fenomenelor de propagare a sunetului
prin diverse medii, demonstrand ca viteza sunetului prin anumite materiale
depinde de caracteristicile acestora. Mai exact, elasticitatea si
densitatea mediului de propagare determina viteza de propagarea sunetului
prin acel mediu. Printre factorii de care depinde viteza de propagare a
sunetului prin anumite medii se numara si densitatea si
temperatura, dar si starea de agregare a mediului (faptul ca
avem de-a face cu un gaz, un lichid sau un solid). Iata in continuare un
tabel care prezinta viteza sunetului prin diferite medii si materiale:
|
Mediul
|
Viteza sunetului (metri/secunda)
|
|
aer la 00C
|
|
|
aer la 200C
|
|
|
aer la 1000C
|
|
|
heliu la 00C
|
|
|
mercur
|
|
|
apa la 200C
|
|
|
plumb
|
|
|
lemn de stejar
|
|
|
fier
|
|
|
cupru
|
|
|
sticla
|
|
|
otel
|
|
Tabel
3
Viteza sunetului in apa variaza, in principal, in functie de
temperatura si de salinitate. Aparatele moderne care folosesc efectul
Doppler pentru masurarea sunetuli in apa au inclus un senzor de
temperatura (± 0.1 ° C ± 0,2 ° F) pentru corectarea automata a vitezei
sunetului in functie de valoarea salinitatii, aceasta fiind introdusa si utilizata
pentru calcularea vitezei sunetului.
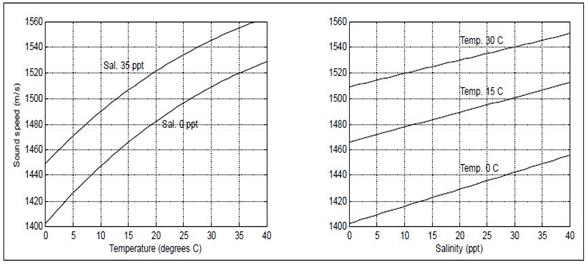
Figura 5 -
Viteza sunetului in functie de temperatura si de salinitate
In figura 5 sunt prezentate viteze ale sunetului in functie de
temperatura la doua niveluri diferite de salinitate (stanga) si la trei
niveluri de temperatura (dreapta). Ca o regula generala: schimbarea
de temperatura de 5°C rezulta o schimbare a vitezei sunetului cu 100%. O
schimbare a salinitatii de 12 ppm duce la o schimbare a vitezei sunetului de 1%.
Intreaga scara de temperatura tipica (-2 - 40 ° C; 28 - 105 ° F) si
nivelurile de salinitate (0 - 35 ppt) ofera o viteza a sunetului
cuprinse intre 1400 - 1560 m/s - in total o schimbare de 11%.
Triton
ADV - Prezentare
1 Triton ADV - componente, terminologie
si prelevarea probelor
Dispozitivul de masurare a curentilor acvatici Triton (Fig. 6) utilizeaza
o carcasa submersibila pentru toata electronica sistemului (receptor,
procesor, recorder, compas/senzor de inclinare) si bateria alcalina. Acest
sistem poate, de asemenea, sa functioneze alimentat dintr-o sursa de
alimentare extrerna.
Urmatorii termeni sunt folositi regulat, atunci cand ne referim la
Triton: - Sonda - consta intr-un
transmitator si trei receptoare (pentru masuratori 3D).
Componentele sondei si modalitatea de functionare sunt prezentate in figura
6.
- Transmitatorul -
transmitatorul acustic central genereaza un scurt puls de sunet
cu
cea mai mare parte a energiei concentrata
intr-un fascicul ingust (6 mm in diametru).
- Receptor - receptoarele acustice
sunt montate pe brate din baza centrala a dispozitivului.
Receptoarele sunt sensibile la un fascicul ingust,
si sunt concentrate pe un volum
situat la o distanta de la un punct fix
de capul sondei (nominal 10 cm).
- Esantionarea volumului -
Prelevarea probelor de volum este punctul fizic in care Triton 3D face
masuratorile.
Principiul de functionare al
dispozitivului Triton ADV este urmatorul:
- Montarea: triton
este montat pe un picior de metal de 15 cm sau pe un cablu flexibil de 0,7-m
- Receptorul: electronica
receptorului amplifica si filtreaza semnalele de la sonda.
- Procesorul: procesorul
este alcatuit din doua placi de circuite care efectueaza toate
procesele de viteza Doppler, acestea fiind montate in interiorul carcasei
submersibile.
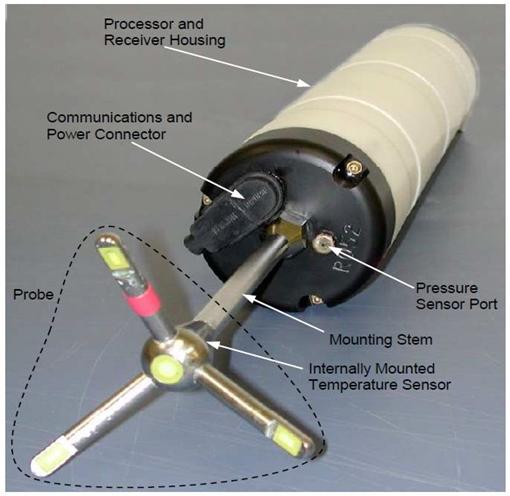
Figura 6 - Triton - Configuratia submersibila
- Alimentarea si cablul de comunicatii:
un singur cablu de conectare alimenteaza dispozitivul si ajuta
la comunicarea intre procesor si computer, prin protocolul de comunicare
utilizat de catre Triton.
- Senzorul de temperatura: datele
de la sonda de temperatura compenseaza
schimbarile vitezei sunetului, care este
folosita pentru a converti indici Doppler in viteza apei.
- Compas/senzor de inclinare: acest
senzor magnetic masoara polaritatea si cele doua axe de
inclinare (inclinatia maxima ± 50°). Acesta permite raportarea vitezei
masurate in functie de coordnatele Pamantului (Est, Nord, UP sau
ENU).
- Senzorul de
presiune: acest senzor este montat in Triton, in interiorul carcasei
submersibile. Senzorul ofera o masuratoare a distantei de
imersie, presiune si inaltimea valurilor.
- Acumulatorii: dispozitivul Triton
foloseste baterii pentru autonomie sau ca o
rezerva in cazul in care sursa exterioara
cedeaza.
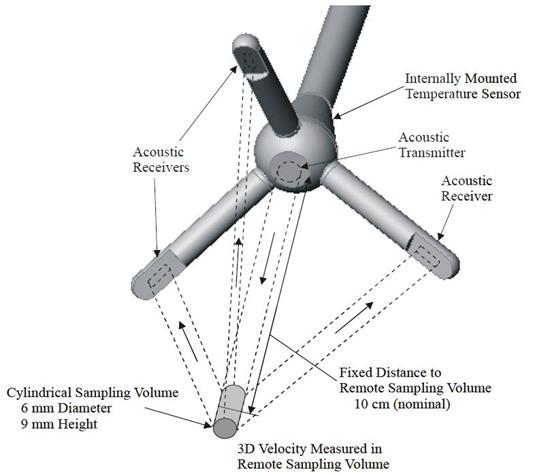
Figura. 7 -
Triton - Prelevarea probelor de volum
2. Triton
ADV - Principii de functionare
In figura 8 sunt prezentate functiile de baza ale dispozitivului Triton. Triton
este un curentmetru bistatic bazat pe efect Doppler.
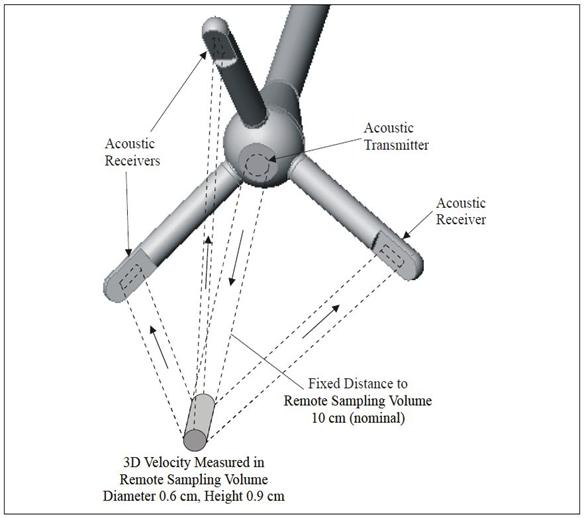
Figura 8 -
Triton - Prelevarea probelor de volum
Bistatic inseamna mijloace separate acustice, unde traductoarele sunt
utilizate ca emitator si receptor. Receptoarele sunt montate, astfel
incat fasciculele se intersecteaza cu un volum de apa situat la o
distanta de 10 cm fata de capatul sondei Fascicul de
intersectie determina locatia de prelevare a probelor de volum
de apa in care se fac masuratori.
Triton masoara viteza curentilor, generand, cu ajutorul transmitatorului,
un puls scurt de sunet cu frecventa cunoscuta, sunetul strabatand
apa dealungul axei fascicolului. Pulsul trece prin zona de prelevare a probelor
de volum si se reflecta in toate directiile particulelor aflate
in suspensie (sedimente, organisme mici, bule).
Unele portiuni din energia reflectata se intorc la receptor sub
forma de fascicul de-a lungul axelor. Astfel semnalul reflectat este prelevat
de receptoarele acustice. Procesorul masoara modificarile de
frecventa pentru fiecare receptor, iar cunoasterea relativa a
orientarii a axelor bistatice fata de toate receptoarele permite
dispozitivului sa calculeze viteza tridimensionala in volumului de apa
prelevat.
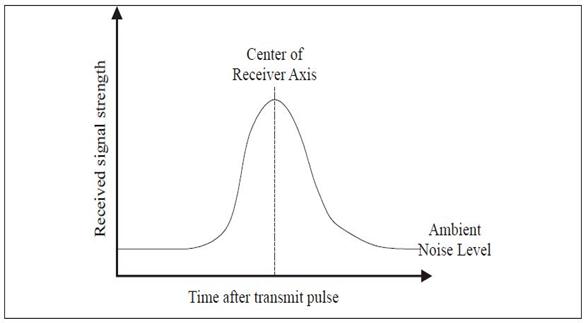
Figura 9 -
Triton - Profilul semnalului
Figura 9 prezinta profilul timp-semnal pentru Triton. Pe axa
orizontala ne arata timpul dupa transmiterea pulsul, iar pe axa
verticala ne arata semnalul intors si masurat de un
receptor. Pe masura ce pulsul strabate apa, sunetul se reflecta
in toate directiile. Imediat dupa transmiterea pulsului, reflectiile
vin si din afara receptorului, receptorul masoarand si nivelul
zgomotului de fond.
Pulsul se propaga de-a lungul
axei de transmitere, acesta mutandu-se mai aproape de receptor, iar receptorul
sesizand o crestere a semnalului, acesta atingand un nivel maxim, la
intersectia fascicolelor de transmitere si de primire.
Geometria fascicolului si masurarea
tridimensionala
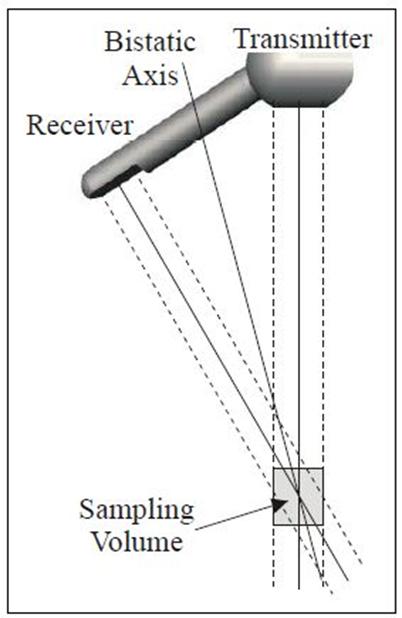
Figura 10 - Axa bistatica
O singura pereche de transmitator/receptor
masoara intr-un punct proiectia 3D si viteza pe axa bistatica,
acesta fiind la jumatatea distantei dintre transmitator
si receptor (Figura
10).
Viteza masurata prin fiecare receptor se numeste viteza
bistatica, Triton folosind un transmitator si doua sau trei
receptoare (pentru sonda 2D sau 3D). Receptoarele se intersecteaza cu
fascicolul trimis cu un model comun de volum pentru prelevarea probelor. Vitezele
bistatice sunt convertite intr-un sistem de coordonate cartezian (XYZ), viteze
fiind determinate cu ajutorul sondei de geometrie. In timpul procesului de
fabricatie, sonda de geometrie este precis
determinata printr-o procedura de calibrare. Calibrarea trebuie sa
fie efectuata o singura data, recalibrarea periodica nefiind
necesara. Triton poate sa includa si un compas/senzor de
orientare pentru acuratetea masuratorilor.
Cunoscand orientarea dispozitivului, permite acestuia raportarea vitezei fata
de Terra intr-un sistem de coordonate ENU (East-Nordh-Up), utilizand aceste
coordonatele ENU sistemul permite sondei de a raporta date exacte referitore la
curenti chiar daca orientarea este variabila sau este
necunoscuta
4. Prelevarea
probelor de volum
Triton
preia esantioane de volum la 10 cm fata de capatul sondei (Fig.).
Locatia exacta variaza cu ± 0,5 cm de la proba la proba, in
schimb locatia exacta a probei de volum este stiuta pentru
fiecare proba in parte, fiind determinata de centrul vertical al
probei.
Dimensiunea fizica a volumului de esantionare este aproximata,
ca un cilindru cu
diametrul de 0.6 cm si lungimea de 0.9 cm (Figura 10).
O determinare a marimii probei de volum este complicata, deoarece
dimensiunea este determinata
de patru factori, cum ar fi: transmiterea modelului de fascicul, primirea
modelului de fascicul, lungimea pulsului acustic, perioada de timp
in care se asteapta revenirea semnalului, extinderea verticala a probei de
volum este defnita de lungimea de unda a sunetului, acesti
parametri fiind controlati de software-ul sondei. Inaltimea volumului
esantionat este de 0.9 cm iar marginile
verticale sunt definite la ± 0.05 cm.
5. Procesarea
Procesarea datelor are loc in felul urmator: emitatorul transmite
un singur fascicul de sunet iar receptorul masoara schimbarea frecventei
la intoarcerea semnalului, Triton folosind pulsuri legate pentru
prelucrarea datelor (Figura 11).
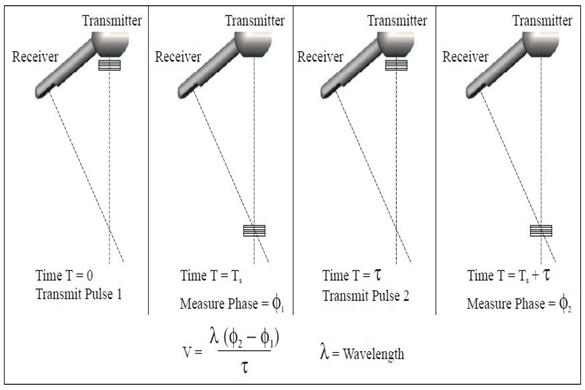
Figura 11
Pulsurile legate sunt prelucrate, dupa cum urmeaza: Triton
trimite doua impulsuri de sunet separate intr-un timp, . Fiecare
receptor masoara faza ( ) de revenire a semnalul de la fiecare puls. Schimbarea
de faza ( 1), impartita
la timp ( ) este proportionala cu viteza. Aceste
pulsuri legate sunt prelucrate si ofera cea mai buna
rezolutie spatiala si temporala a oricarei tehnica
de prelucrare Doppler. Exista mai multe aspecte ale
pulsurilor legate de prelucrare, care afecteaza operatiunile
sondei.
Un aspect este de limitarea vitezei maxime care poate fi masurata.
Pulsurile legatede sunt prelucrare in de faza de intoarcere. Faza masuratorilor
sunt limitate la o serie de [- ]. In cazul in care faza
depaseste aceste limite, se va 'infasurat in
jurul lui' (de exemplu, in cazul in faza de cresteri mai sus a , sonda
masoara o faza de - ). Acest lucru este cunoscut ca un salt de
ambiguitate, in cazul in care sonda va masura negativ, mai degraba
decat viteza reala, viteza fiind mai mare. Perioada maxima de
viteza este in functie de intervalul de timp ( ) intre cele
doua impulsuri. Triton poate fi utilizat in doua moduri diferite in
ceea ce priveste viteza maxima. In modul auto, unde sonda trimite
impulsuri in mod automat si determina care este cea mai buna
metoda de masurare. In acest mod, sonda ofera cea
mai buna performanta posibila pentru orice viteza in gama
de masurare de 0.01 la 600 cm/s.
Sonda ofera posibilitatea de a alege din mai multe intervale
prestabilite, fiecare dintre acestea corespunzand
unui anumit puls de intarziere. In cazul in care viteza maxima
depaseste viteza de specificata,
rezultatul vitezei si datele vor fi compromise.
Pentru cele mai multe aplicatii, modulul auto este cel preferat. Modulul
auto ofera cea mai buna performanta cu nici un risc de
ambiguitate si erori. In modulul auto consumul de energie creste cu
aproximativ cu 1% - 2%. Singurul motiv pentru prelevarea probelor de viteza la
perioade prestabilite este acela de a reduce consumul de energie electrica (de
exemplu, atunci cand sonda functioneaza pe baterie). Chiar
si atunci cand se utilizeaza modulul Auto, sonda consuma numai 0.5
W, iar prelevarea probelor la perioade de timp determinate este folosita rar.
Pulsurile legate afecteaza functionarea sondei in alte doua
situatii. Cand a fac masuratori langa un obstacol, exista
posibilitatea de reflectare a primul puls de
la obstacol care ar putea interfera cu cel de-al doilea puls. Posibilitatea de
a regla intervalul de timp intre impulsuri ofera sondei performante
excelente pentru
aplicatii cu numar scazut de fluxuri.
6. Inregistrarea datelor
Triton inregistreaza la fiecare proba
urmatoarele tipuri de date: data si ora ceasului intern a sondei, trei
valori ale vitezei, cate unul pentru fiecare componenta 3D, trei valori ale
semnalului, cate unul pentru fiecare receptor, trei valori de
eroare standard, cate unul pentru fiecare componenta a vitezei, date
provenite de la senzorul de temperatura, busola/senzorul de inclinare
si date legate de adancime provenite de la senzorul de presiune.
7. Viteza masurata si stabilirea
gamei de viteze
Procesul tehnic Doppler folosit de Triton ofera diferite avantaje si performanta.
Acesta poate masura viteza apei tridimensional de la 0.01 la 600 cm/s. Pentru
cele mai multe aplicatii, datele legate de viteza pot fi folosite
imediat, fara nici o corectie de postprocesare. Viteza este de
obicei in sistemul de coordonate cartezian (XYZ) referitoare la orientarea
sondei. Viteza poate fi redata in functie de
coordonatele ENU indiferent de orientarea sondei, iar calibrarea
sondei nu se schimba cu exceptia cazului in care sonda a fost fizic
deteriorata. Singurele date care necesita postprocesare sunt cele
atunci cand viteza sunetului a fost incorect
specificata.
Sunt cateva aspecte legate de functionarea dispozitivului Triton care
pot afectea calitatea vitezei si a datelor cum ar fi: setarea eronata
a scarii de viteza, rata de esantionare, incertitudinile pe termen
scurt, precizia.
Viteza maxima, care poate fi masurata cu ajutorul sondei Triton
variaza in functie de gama stabilita. Pentru majoritatea aplicatiilor, este
preferat modulul auto deoarece ofera o gama a vitezei stabilita pentru a
atinge performante maxime. Pentru aplicatii cand se folosesc
bateriile ca sursa de alimentare, o presetabilire a gamei de viteza va
reduce consumul de energie si va
extinde durata masuratorilor.
Setarile pentru gama de viteza sunt
prezentate in tabelul 4. In modulul auto, este oferita cea mai buna
performanta pentru ca are cea mai larga gama de viteze.
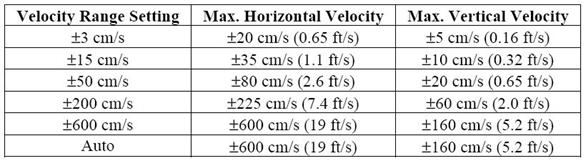
Tabel 4
Setarile sunt valori nominale, Triton masurand
vitezele de-a lungul axei bistatice la fiecare receptor. Avand in vedere
ca axele bistatice sunt la 15 ° de axa verticala, sonda este mai
sensibila la debitul
vertical iar viteza maxima este mai mica pentru flux-ul vertical. Tabelul
4 prezinta vitezele maxime care pot fi masurate in fiecare proba
pentru viteza verticala sau orizontala si debit.
8. Prelevarea probelor si gradul de
incertitudine pe termen scurt
Masurarea individuala a vitezei 3D este mentionata ca
un ping. Triton trimite 10 ping-uri pe secunda, cu ajutorul acestor ping-uri
se produce o medie a vitezei tridimensionale. Pentru rezultate cat mai bune, sonda
mareste numarul de ping-uri pe secunda.
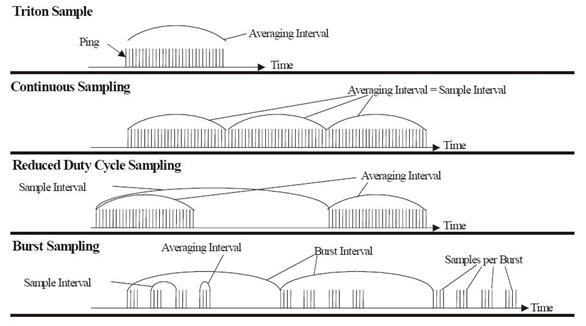
Figura 12
Strategia de prelevare a probelor este
prezentata in figura 12, si diverse configuratii pentru
prelevarea probelor de volum dupa cum urmeaza:
prelevare countinua: este folosita
pentru masurarea in timp real sau pentru masuratori contiune atunci cand
dispozitivul este conectat la o sursa externa de energie;
interval redus de masurare: aceasta
configuratie este folosita atunci cand dispozitivul Triton este
alimentat de acumulatorii interni si/sau se face o monitorizare a
parametrilor curentilor acvatici pentru intervale prestabilite de timp si
cu un timp de mediere intre ele;
probe aleatorii: aceasta configuratie ne
permite sa obtinem informatii despre variatia curentilor acvatici pentru scurte
perioade de timp, acesta luand cateva probe succesive intrand apoi in modulul
de hibernare.
Sonda Triton, la fel ca toate sistemele Doppler, are un senzor de
masurare a zgomotului de fond. Nivelul zgomotului de fond este o urmare a procesului fizic prin
care undele acustice sunt izolate de particule din apa, si este
denumit zgomot Doppler. Zgomotul Doppler este aleator, si se
poate presupune ca urmeaza distributia Gaussiana Nivelul zgomotului
de fond scade odata cu radacina patrata a intervalului
mediu.
Tabelul 5 ofera o estimare a nivelurilor de zgomot pentru diferite
viteze si setari.
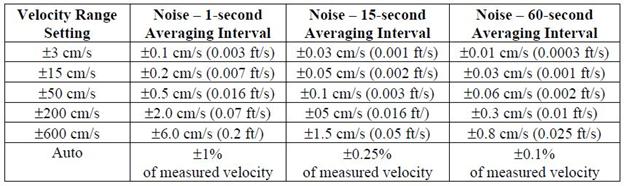
Tabel 5
- Nivelul zgomotului de fond
Valorile prezentate in tabelul sunt pentru
vitezele orizontale, aceste valori reflecta numai zgomotul generat de aparat, si
nu pentru variatiile de apei in miscare. De cele mai multe ori, variatiile
de miscare ale apei vor fi mult mai mari decat zgomotele generate de aparat.
9. Precizia, semnalul si eroarea
standard
Precizia se refera la prevederea masuratorii vitezei, dupa eliminarea
zgomotului de fond. Exista doi principali factori care
influenteaza precizia sondei: viteza sunetului si
geometria sondei, astfel erorile sunt, de obicei, neglijabile
(mai putin de 0,25%) ; Erorile mai mari (care sunt mai
putin frecvente) pot fi corectate in postprocesare.
Intensitatea semnalului acustic reflectat si apoi masurat de Triton, acesta este
inregistrat intr-o unitate logaritmica numit "count"; un count = 0.72 dB, nivelul
semnalului fiind de obicei comparat cu nivelul zgomotului de fond, care se
masoara direct, utilizand
software-ul Triton. Pentru buna functionare, nivelul semnalului, ar trebui
sa fie de cel putin 20 count (15 dB) mai mare decat nivelul de
zgomot, astfel viteza exacta poate fi obtinuta cu doar 10 count
(7 dB) peste nivelul de zgomot. Desi vor exista mai multe incertitudini (zgomot
Doppler) in masurarile individuale, semnalul scazut indica o
lipsa a particulelor in apa. Pentru apa
fara particule in suspensie, se introduce
material pentru a creste nivelul particulelor, implicit crescand nivelul
semnalului.
Semnalul variaza in functie de cantitatea si tipul particulelor
din apa aflate in suspensie. Cu ajutorul nivelului de semnal putem
masura concentratiea de sedimente, chiar daca semnalul sondei nu
poate fi imediat procesat pentru acesta determinare, dar dupa o calibrare
corespunzatoare, furnizeaza o imagine clara a fluctuatiilor sedimentare si
poate fi folosit pentru determinarea concentratiilor acestora.
Eroarea standard a sondei este prevazuta ca o masura
directa a calitatii de viteza. O eroare standard este
raportata pentru fiecare componenta a vitezei si poate fi
interpretata direct de o estimare a precizie vitezei medie si raportata
pentru o proba.
Un avantaj semnificativ al dispozitivul bazat pe efect Doppler - Triton ADV
este ca nu exista nici un debit minim pentru a detecta viteza. In conditii
normale de functionare, sonda Triton va da randament bun chiar si la 0.1 cm/s.
10. Senzorii externi integrati
Triton este proiectat pentru a permite integrarea de alti senzori
si pentru a stoca toate datele intr-un singur fisier. Trei tipuri
principali de senzori sunt disponibili (senzorul de temperatura care este
inclus standard, cu toate sistemele), senzorul de presiune, senzorul de conductivitate-temperatura
si multiparametru - sonda de mediu.
11. Triton ADV - Software
Dispozitivul Triton include si un
software pentru Windows. Acesta consta intr-un program principal care este
utilizat pentru a lansa diferite module. Fiecare modul indeplinind o functie
specifica.
Software-ul ViewTriton cuprinde urmatoarele
functii: sistemul de diagnostic, implementarea autonomiei, extragerea
datelor si procesorul de date. Software-ul SonUtils contine un
terminal, un soft pentru calibrarea busolei si un extractor al bazei de date.
Cu ajutorul programului ViewTriton putem rula
programul de diagnosticare pentru a verifica performantele sondei si de
a identifica cele mai multe probleme aparute in timpul functionarii.
Figura 13
In figura 13 sunt prezentate datele de iesire
ale programului de diagnosticare. Cresterea semnalului o putem observa printr-o
curba in forma de clopot, varful ascutit semnifica limita maxima de masurare in
aproprierea unui obstacol si nivelul zgomotului de fond.
Diagnosticarea problemelor fizice poate fi utilizata pentru a detecta
aproape orice problema cum ar fi: in cazul in care cablul de legatura
dintre senzori nu este conectat la procesor, programul arata semnal zero pentru
toate cele trei receptoare, afisandu-se un grafic gol. Deasemenea aceasta
problema poate aparea si in cazul in care cablul de frecventa
inalta este deteriorat.
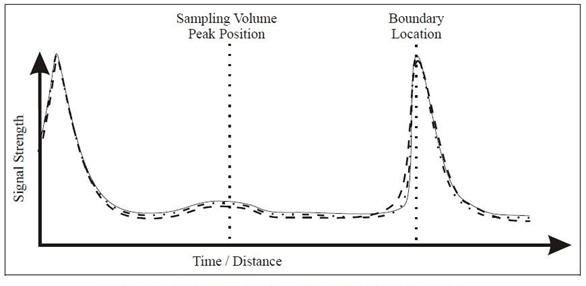
Figura 14
In figura 14 e prezentata
cantitatea particulelor din apa aflate in suspensie.
In cazul in care sunt insuficiente particule in suspensie (de exemplu, apa
este foarte clara), pentru prelevarea probelor sau aceste sunt inexistente, aceasta
situatie poate fi confundata cu o functionare defectuasa a
emitatoarelor, cu exceptia cazului in care sonda este la marginea
unui obstacol.
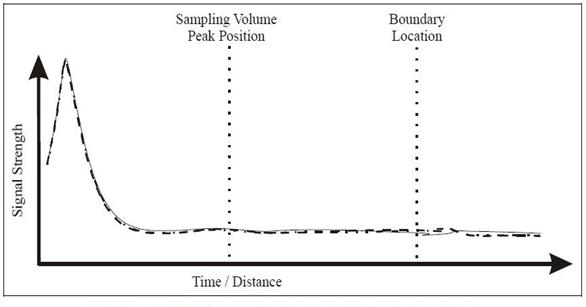
Figura 15 - Functionarea incorecta
a transmitatoarelor
Acest
lucru poate fi confundat ca o deconectare a sondei sau a nivelului scazut de particule
in suspensie. Absenta unei limite de reflectie ajuta la
distingerea dintre nivelul scazut de particule in suspensie si functionarea
incorecta a trasmitatoarelor.
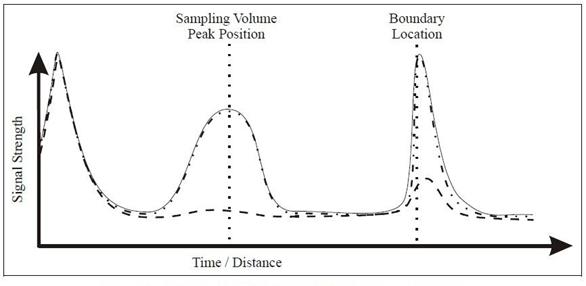
Figura 16 - Functionarea incorecta
a receptorilor
Semnalul de la fiecare receptor ar trebui sa
aiba aproximativ aceeasi concentratie ca volum de prelevare a
probelor prelevate.
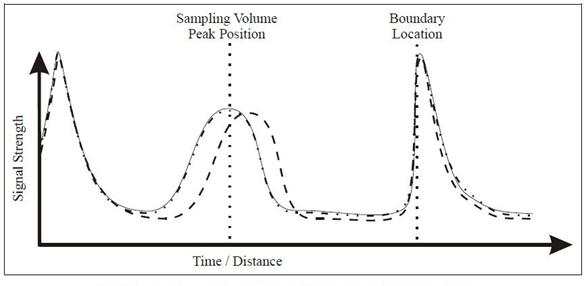
Figura 17 - Diagnostic: bratul receptor
deteriorat
In cazul in care intr-un
volum de prelevare a probelor receptorul este in afara axei orizontale, inseamna
ca bratele receptorului au fost indoite.
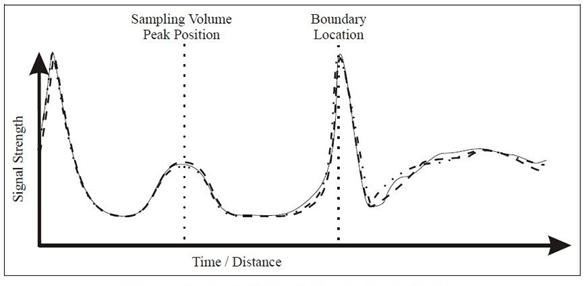
Figura 18 - Diagnostic: semnalul a depasit
limita maxima
In
cazul in care nivelul semnalului a depasit limita maxima, zgomotul aparut
poate scadea capacitatea de masurare.
Pentru inregistrarea datelor se
utilizeaza formatul ASCII simplu cu 11 valori pe fiecare linie, dupa cum
se arata in tebelul 6.
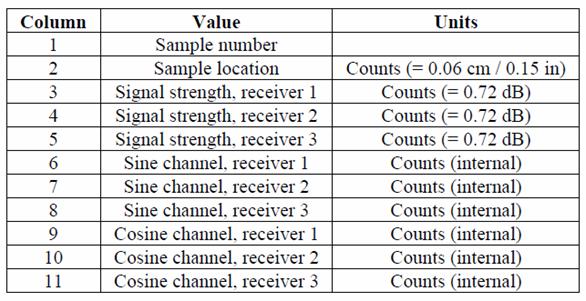
Tabel 6
Diagnosticul
este pentru aproximativ 150 de esantioane (de exemplu, 150 de linii) pentru
fiecare inregistrare a semnalului de profil.
Cu ajutorul acestui program putem
extrage datele masurate de Triton din memoria interna a dispozitivului. Conectarea
intre PC si Triton se realizeaza cu ajutorul unui cablu de conectare,
cu ajutorul portului COM.
Figura 19 - ViewTriton - Modulul de extragere
a datelor
Utilizand
programul SonUtils, se poate efectua recalibrarea busolei, se pot extrage
datele inregistrate si se poate deschide un terminal pentru comunicarea
directa cu Triton (Figura 18).
Toate functiile importante pot fi
acesate de la acest terminal, folosind o interfata simpla bazata
pe comenzi text. In zona de sus, in stanga, este folosita pentru a seta
parametrii de baza pentru comunicare; zona de mijloc-stanga contine cateva
dintre cele mai folosite comenzi care pot fi trimise rapid instrumentului cu un
singul click. In zona albastra de sus sunt reprezentate instrumentele de iesire,
iar zona alba de jos este folosita pentru a introduce comenzi.
Utilizant portul de comunicare COM se
realizeaza contectarea intre PC si Triton. Prin acest modul se poate
sincroniza ceasul si data interna a aparatului dar se pot trmite
si comenzi de incepere a colectarii datelor in timp real.
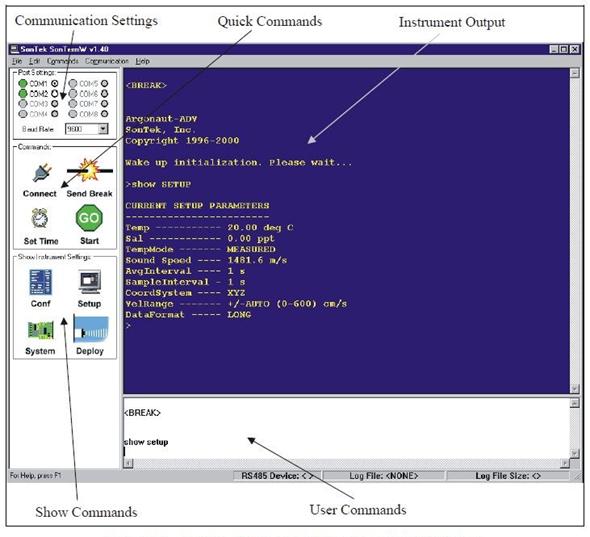
Figura 20 - Terminal de comunicare
12. Sistemul de implementare a parametrilor
Conectand la PC dispozitivul Triton,
putem introduce intervalul de masurare a diferitilor senzori care
sunt conectati la Triton, cum ar fi: intervalul de masurare sau
perioada de masurare.
Sistemele de coordonate utilizate de
Triton sunt: BEAM, XYZ si ENU. ENU in mod normal, este recomandat pentru
sistemele interne cu busola/senzor de inclinare. Sistemul cartezian XYZ
este recomandat pentru sistemele interne fara busola/senzor de inclinare.
BEAM-ul este numai pentru aplicatii specializate si nu este frecvent
utilizat.
Pentru masurarea temperaturii,
Triton utilizeaza un senzor de temperatura incorporat si il
foloseste pentru calcularea vitezei sunetului. De cele mai multe ori, senzorul
de temperatura este recomandat pentru cele mai multe aplicatii.
Viteza sunetului este calculata
de Triton pe baza datelor referitoare la salinitate introduse manual de catre
utilizator si de temperatura masurata de catre senzorul intern.
Pentru masurarea presiunii, inaltimii
si frecventei valurilor se foloseste senzorul de presiune. Datele
legate de presiune sunt succesive sau la intervale prestabilite de timp in functie
de profilul selectat. Parametri pot fi setati intr-un intervat de 1 pana la 255
de profiluri. Daca este setat la 0, datale masurate nu vor fi inregistrate. Rata
de prelevare a probelor pentru valuri poate avea un interval al frecventei de 1,2
sau 4 Hz, parametrul implicit fiind de 1 Hz.
Triton are un ceas intern care este
sincronizat la fiecare conectare a acestuia cu PC-ul. Data si ora sunt
introduse in fisierul de iesire pentru ficare masuratoare
efectuata.
Modulul de procesare este utilizat
pentru a afisa datele si de a le exporta in format ASCII (Figura 21).
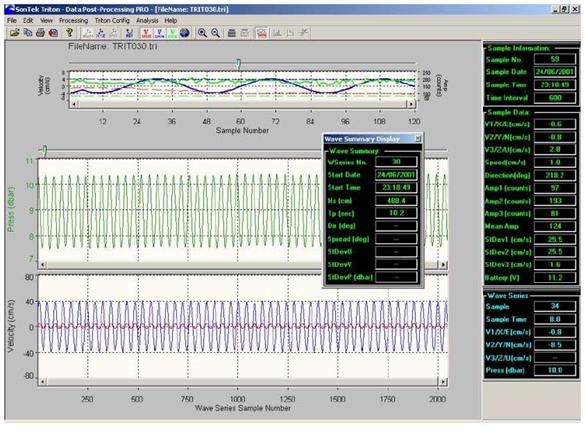
Figura 21 - Modulul de procesare a datelor.
Aici putem vizualiza toate
masuratorile efectuate de Triton intr-un model grafic. Bara de meniu ofera
acces pentru comenzile de prelucrare a parametrilor, bara de instrumente contine
butoane pentru cele mai importante functii de procesare. In partea de sus este
reprezentata viteza apei la diferite intervale de timp. In partea dreapta
a ecranului se afla tabelele de afisare a datelor masurate.

